





























25
CHAPTER2 PROFIBUS Unit
■
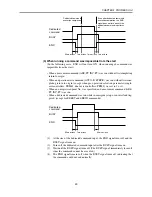
"Servo status" output (SRV-O)
Displays the robot servo status.
This turns ON when all axes are at servo-ON. However, this output is OFF if even just
one axis is in servo-OFF status.
* This servo status output is always enabled, even if the "servo status output selec-
tion" parameter (single-axis controllers: PRM46, dual-axis controllers: PRM21)
does not have to be changed.
■
"Origin return status" output (ORG-O)
This outputs the robot origin return status.
This output is ON when origin return is complete on all axes. This output however
turns OFF if even origin return on even just one axis is incomplete.
* This output is always enabled, even if the "origin return completed action selec-
tion" parameter (single-axis controllers: PRM33, dual-axis controllers: PRM2) does
not have to be changed.
■
Zone output (ZONE0 to ZONE3)
This specifies the output destination of the zone output function.
The zone output is used to control the signal output when the robot's current position
is within the specified range.
To use the zone output function, the desired zone output must be enabled by the Zone
output selection parameter (single-axis controllers: PRM53, dual-axis controllers:
PRM24). This parameter also sets the zone output logic.
Use point data to specify the range. Point numbers and output signal names used for
each zone are shown below.
For details on the zone output, refer to the "Zone output selection" parameter de-
scribed in the controller user's manual.
Setting range and output port for each zone
ZONE No.
Specified range Output signal name
ZONE 0
P900-P901
ZONE 0
ZONE 1
P902-P903
ZONE 1
ZONE 2
P904-P905
ZONE 2
ZONE 3
P906-P907
ZONE 3
M E M O
M E M O
The zone output is supported by the following controller versions:
ERCX, SRCX : Ver. 13.50 or later
DRCX
: Ver. 18.50 or later
SRCP, SRCD
: Ver. 24.00 or later
SRCP30
: Ver. 24.30H or later
2-7-8
General-purpose outputs (SO200 - SO231)
These are outputs available to the user and can be freely turned on and off within the
program. All general-purpose outputs are reset (OFF) when the power is turned on or
when the program is reset.
* A parallel I/O port used for emulated serialization cannot be controlled while a pro-
gram is running. Also, the output from a parallel I/O port used for emulated serializa-
tion does not change even if reset with the RESET command.







































































