





























24
CHAPTER2 PROFIBUS Unit
2-7-7
Dedicated outputs
Dedicated outputs inform the sequencer (PLC) of controller status.
■
"Preparation completed" output (READY)
The dedicated output is ON while the controller system is operating normally. How-
ever the output turns OFF under any of the following conditions and the motor be-
comes "free".
• During emergency stop
The READY output turns ON again when emergency stop is canceled. After can-
celing emergency stop, operation can be restarted by inputting the servo recovery
command (SERVO).
• During alarm
If the READY signal is OFF but the robot is not in emergency stop, then some kind
of alarm was issued. In this case, operation cannot resume unless the power is turned
off and then on again.
■
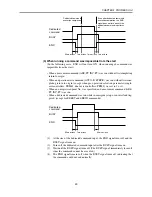
"Command execution in progress" output (BUSY)
The BUSY signal is ON during execution of a dedicated command input, or execu-
tion of a command from the HPB (or personal computer). This signal turns ON when
the dedicated input signal is received, so turn dedicated input signal OFF when the
BUSY signal turns ON. The BUSY output turns OFF when the executing of this
command is ended. (However, all the dedicated inputs must be OFF at this time.)
!
CAUTION
Always input the dedicated command input as a pulse signal. If this input stays ON,
the BUSY signal cannot be turned OFF even if finished executing the command.
If the BUSY output is at ON, then the controller cannot accept dedicated inputs
and commands from the HPB (or personal computer). Do not try to operate the
HPB while the I/O interface is controlling the controller.
(This could cause communication errors with the sequencer (PLC) or cause com-
munication error to occur in the HPB.
■
"Execution ended" output (END)
This signal turns OFF when a dedicated command input is received, and then turns
ON when the command ends normally. When an error occurs during execution of a
command or when an interlock or emergency stop has triggered, the END signal
remains unchanged at OFF.
!
CAUTION
When the RESET command or a movement command for only a small move-
ment is run, the time for running the command (in other words the interval that
the END signal is OFF) is extremely short. (Sometimes less than 1ms.)
The END signal will not change during operation from the HPB (or personal
computer).
M E M O
M E M O
By changing the System mode selection parameter setting (single-axis controllers:
PRM34, dual-axis controllers: PRM20), the execution result of a dedicated command
can be output to the END signal at the time when the dedicated command input has
turned OFF after the command execution.
For details on the System mode selection parameter, refer to "Description of each
parameter" in the controller user's manual.







































































