



























34
CHAPTER2 PROFIBUS Unit
2-8-6
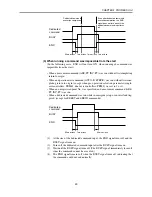
When point movement commands are run
■
When executing a point movement command (ABS-PT, INC-PT), the point data
and speed data must be input before inputting the dedicated command. When
specifying the moving axis, the axis selection data must be input.
The point data and speed data inputs are designated with SI200 to SI211. The axis
selection data input is designated with SI213 to SI214. (Refer to “2-7-3 General-
purpose input (SI200 to SI231)”.)
Data retention
Robot movement
30ms or more
Point data (SI200 to 209)
Speed data (SI210,SI211)
Axis selection data (SI213,SI214)
Point movement command
(ABS-PT,INC-PT)
BUSY
Actual robot operation
END
(1) Input the point and speed data into SI200 - SI211. To specify a movement axis,
input the axis (designation) data into SI213, SI214. Please hold this data until the
BUSY signal turns on. (Changing data while busy may sometimes cause data
recognition errors.)
(2) Input the point movement commands (ABS-PT, INC-PT) after delaying the time
to 30 ms or more.
(3) The END signal turns off at the rise of the dedicated input pulse, and the BUSY
signal turns on.
(4) After checking that the BUSY is on, the dedicated input command is set to off.
From hereon, point data, speed data (SI200 - SI211), and the axis (designation)
data (SI213 and SI214) may be changed as needed.
(5) Waits until the BUSY signal turns off.
(6) When the BUSY signal has turned off, the END signal is at ON, indicating that
the command ended normally.







































































