



























50
CHAPTER2 PROFIBUS Unit
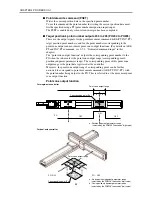
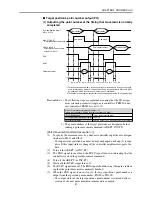
[Point movement command execution
w
]
(8)
Execute the next point movement command.
(9)
When the controller received the point movement command and the BUSY
signal turned on, the previous target position's point number being output from
the specified point number (PO200 to PO205) is cleared and the current target
position's point number is then output.
!
CAUTION
• If moving the robot to point 0 by specifying it with a point movement com-
mand that is first executed after turning on the controller, all of PO200 to
PO205 still remain off (because P0 = 000000
(binary)
) even after the robot has
moved to point 0. This means that the PO200 to PO205 status does not change
even after specifying P0 as the target position, so no information is available to
indicate whether the movement command to P0 was received. This should be
kept in mind when moving the robot to point 0.
• When specifying the axis, the SI213 and SI214 status must be checked before-
hand. (Refer to "PRM10: Control axis selection with I/O command" in the
DRCX controller user's manual.







































































