


























43
CHAPTER2 PROFIBUS Unit
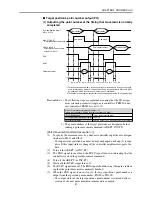
Target position point numbers for point movement commands (ABS-PT, INC-PT)
are output as binary values. The same applies to point numbers which correspond to
the point zone output function and the movement point zone output function.
The PO output format is specified in the "hundreds" place of the I/O assignment
selection parameter setting (single-axis controllers: PRM59, dual-axis controllers:
PRM26)
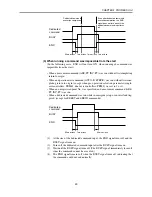
0: PO output occurs at normal movement completion.
1: PO output occurs when movement command is received.
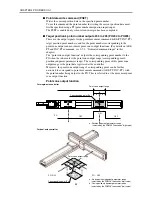
2: Point zone output
(PO output occurs when the current position enters the point data (registered
at the controller)
±
position judgment parameter range.)
3: Movement point zone output
(PO output occurs when the current position enters the point data registered
at the controller, and the point movement command's (ABS-PT, INC-PT)
movement point data
±
position judgment parameter range.)
M E M O
M E M O
The movement point zone output function is supported by the following controller
versions.
ERCX, SRCX : Ver. 13.64 or later
DRCX
: Ver. 18.64 or later
SRCP, SRCD
: Ver. 24.21 or later
SRCP30
: Ver. 24.30H or later
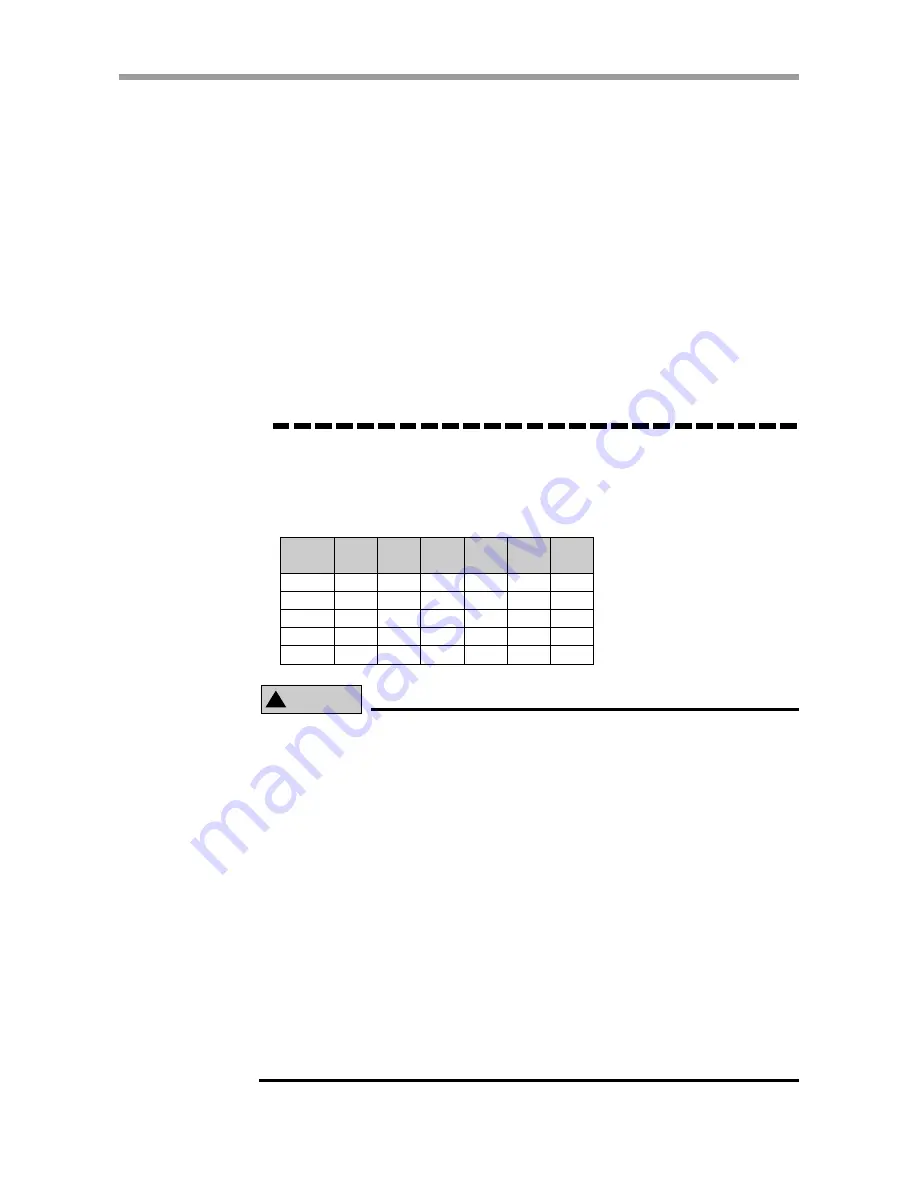
Output example
PO205
(2
5
)
PO No.
Point No.
P0
P1
P7
P31
P63
OFF
OFF
OFF
OFF
ON
PO204
(2
4
)
OFF
OFF
OFF
ON
ON
PO203
(2
3
)
OFF
OFF
OFF
ON
ON
PO202
(2
2
)
OFF
OFF
ON
ON
ON
PO201
(2
1
)
OFF
OFF
ON
ON
ON
PO200
(2
0
)
OFF
ON
ON
ON
ON
!
CAUTION
When using PO as an output signal that indicates the target position’s point
number for point movement commands (ABS-PT, INC-PT):
• If moving the robot to point 0 with at the first point movement command
which is executed after turning the controller on, all the PO200 to PO205
signals still remain off (because P0 = 000000
(binary)
) even after the robot has
moved to point 0. This means that the PO200 to PO205 signal statuses do not
change even after the robot has moved to P0, so no information is available
to indicate whether the robot motion to P0 is complete (or whether the move-
ment command was received). This should be kept in mind when moving the
robot to point 0.
When using PO as an output signal that indicates the corresponding point num-
ber at the point zone output function or the movement point zone output func-
tion:
• If outputting point 0 (P0) as the corresponding point for the point zone out-
put function or the movement point zone output function, all the PO200 to
PO205 signals remain off (because P0 = 000000
(binary)
). This means that the
PO200 to PO205 signal statuses do not change even after the robot has en-
tered the zone specified by P0. This should be kept in mind when monitoring
P0.







































































