





























6-58
Programming Your Application
590+ Series DC Digital Converter
PID
Derivative Gain
Derivative gain instantaneously boosts the PID output signal. Increasing DERIVATIVE TC
decreases the damping, which in most cases causes overshoot and oscillations resulting in an
unacceptable system response.
Note:
For most applications, derivative gain is never used and is usually left at its default value
of 0.000 seconds.
Derivative gain can improve response in some dancer tension controlled systems, particularly
those systems with high inertia dancers which need an instantaneous response to overcome the
weight of the dancer roll. For loadcell controlled tension systems, derivative gain is almost
never
used.
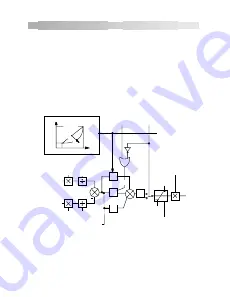
The block diagram below shows the types of system responses possible, MODE = 0 to MODE
= 4.
x
In underdamped systems, the output oscillates and the settling time increases.
x
Critically damped systems have no overshoot or oscillations. They reach the setpoint
within the desired response time.
x
Overdamped systems do not oscillate but do not reach the setpoint within the desired
response time.
+
Input 1
[410]
Ratio 1
[412]
Divider 1
[418]
Input 2
[411]
Ratio 2
[413]
Divider 2
[414]
F
[403]
D
[401]
I
[402]
P
PID Output
[417]
+
+
+
+
Neg Limit
[406]
Pos limit
[405]
O/P Scaler
(Trim) [407]
PID Error
[415]
Enable
[408]
Integral Defeat
[409]
Reset
Prop
[404]
Pmin
[474]
Dmin
Dmax
Mode
[473]
Mode = 0
1
4
Diam*
PID Gain
Profiled Gain
[475]
Gain Profiler
PID Clamped
[416]
0%
* - Linked internally to Diameter Calculator
Block Diagram
Operators can read the PID error, PID output, setpoint and feedback on the drive's MMI by
monitoring the following values:
x
PID ERROR : displayed in the DIAGNOSTICS menu
x
PID OUTPUT : displayed in the DIAGNOSTICS menu
x
SETPOINT : monitored at SETUP PARAMETERS::SPECIAL BLOCKS::PID::INPUT 1
x
FEEDBACK : monitored at SETUP PARAMETERS::SPECIAL BLOCKS::PID::INPUT
2