


























92
Operating Instructions – MOVIAXIS® MX Multi-Axis Servo Inverter
4
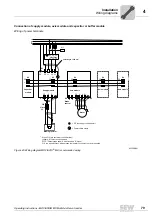
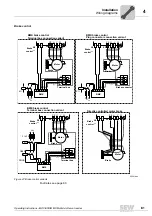
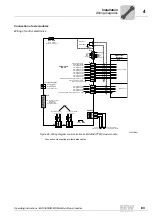
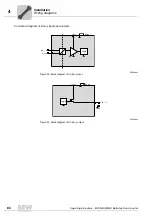
Terminal assignment
Installation
1)
X7:1
X7:2
X7:3
X7:4
+24 V
RGND
C
NC
Unit design with one safety relay, optional
Safety relay I (sizes 1-6)
Safety relay I (size 1-6), common contact
Safety relay I (sizes 1-6), NC contact
The connector comes equipped with a coding nose.
X8:1
X8:2
X8:3
X8:4
+24 V
RGND
C
NC
Design with two safety relays, optional
Safety relay II (sizes 2-6)
Safety relay II (sizes 2-6), common contact
Safety relay II (sizes 2-6), NC contact
The connector comes equipped with a coding nose.
X9a
X9b
a = Input: Signal bus, with green plug
b = Output: Signal bus, with red plug
X10:1
X10:2
X10:3
X10:4
X10:5
X10:6
X10:7
X10:8
X10:9
DIØØ
DIØ1
DIØ2
DIØ3
DIØ4
DIØ5
DIØ6
DIØ7
DIØ8
Binary input 1, with fixed assignment "Output
stage enable"
Binary input 2, freely programmable
Binary input 3, freely programmable
Binary input 4, freely programmable
Binary input 5, freely programmable
Binary input 6, freely programmable
Binary input 7, freely programmable
Binary input 8, freely programmable
Binary input 9, freely programmable
Electrically isolated via opto-
coupler with reference to
DCOM (X10:10).
X10:10
X10:11
DCOM
DGND
Reference potential for binary inputs DIØØ..DIØ8
General reference potential of control electronics
X11:1
X11:2
X11:3
X11:4
X11:5
DOØØ
DOØ1
DOØ2
DOØ3
DGND
Binary output 1, freely programmable
Binary output 2, freely programmable
Binary output 3, freely programmable
Binary output 4, freely programmable
Reference potential for binary outputs DOØØ..DOØ3
X12:1
X12:2
X12:3
X12:4
X12:5
X12:6
X12:7
X12:8
X12:9
n.c.
CAN_L
DGND
CAN_L
R
termination
DGND
CAN_H
CAN_H
R
termination
CAN2 Bus Low
Reference potential CAN bus
CAN2 Bus Low
Unit internal SBus terminating resistor
Reference potential CAN bus
CAN2 Bus High
CAN2 Bus High
Unit internal SBus terminating resistor
X13:1
X13:2
X13:3
X13:4
X13:5
X13:6
X13:7
X13:8
X13:9
X13:10
X13:11
X13:12
X13:13
X13:14
X13:15
S2 (SIN +)
S1 (COS +)
n.c.
2)
R1 (REF +)
TF / TH / KTY -
n.c.
S4 (SIN -)
S3 (COS -)
n.c.
R2 (REF -)
TF / TH / KTY +
n.c.
Motor resolver connection
Table continued on next page. Footnotes on next page.
Terminal
Assignment
Brief description
1
4
1
4
X9a
X9b
11
1
1
5
6
9
5
1
15
9
1
8
Содержание MOVIAXIS MX
Страница 2: ...SEW EURODRIVE Driving the world...
Страница 210: ......
Страница 211: ...SEW EURODRIVE Driving the world...





















































