





























132
Operating Instructions – MOVIAXIS® MX Multi-Axis Servo Inverter
5
MOVIAXIS® startup - Single-motor operation
Startup
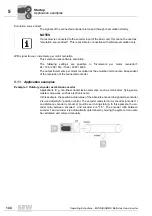
Speed controller
setting
• Enter the values for the speed controller.
11809aen
Figure 85: Speed controller menu
Input data
Description
Moment of inertia J
0
of
the motor
Display field for the mass moment of inertia value for the motor previously
selected.
Load inertia
Input field for maximum external moment of inertia converted for the motor
shaft.
In "CFC" and "SERVO" operating modes, you have the option to determine the
load mass moment of inertia automatically during a travel process. Click on the
"Determine moment of inertia" button to determine the load mass moment of
inertia. Startup must be performed at least once in order to use this function. In
addition to that, a ramp must be traveled cyclically.
Clearance of load
Use the slider to set the clearance of the drive train.
Time interval external
control
Enter the time interval of the external controller. This value is required for all
FCBs that generate a setpoint in an interpolated manner (external ramp gener-
ator) as well as for analog setpoint selection. Note: The input value is not rele-
vant for internal setpoint selection, e. g. FCB09 Positioning.
Scanning frequency n/X
control
Use this field to specify the required scanning frequency of the speed / position
controller. The default setting 1 ms should only be shortened for extremely
dynamic applications.
Stiffness
Use the slider to set the stiffness of the speed controller. The value for the stiff-
ness depends on the power transmission (direct drive high, toothed belt low)
and is a measure for the velocity of the speed control loop. The value for the
standard setting is 1.
You enter the stiffness of the speed control loop either with the sliding scale or
the input field.
•
If you increase the stiffness value, you will also increase the control rate.
SEW-EURODRIVE recommends to increase the value during startup in
small increments (0.05) until the control loop starts oscillating (motor noise).
You will then have to lower the value. This approach ensures an optimum
setting.
•
If you reduce the stiffness value (< 1), the control rate is reduced and the
servo lag increases.
0
0
I
Содержание MOVIAXIS MX
Страница 2: ...SEW EURODRIVE Driving the world...
Страница 210: ......
Страница 211: ...SEW EURODRIVE Driving the world...





















































