


























Operating Instructions – MOVIAXIS® MX Multi-Axis Servo Inverter
91
4
Terminal assignment
Installation
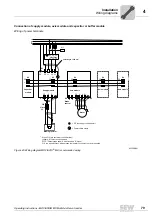
Terminal assignment of the MXA axis modules
1)
X12:1
X12:2
X12:3
X12:4
X12:5
X12:6
X12:7
X12:8
X12:9
n.c.
CAN_L
DGND
CAN_L
R
termination
DGND
CAN_H
CAN_H
R
termination
CAN bus low
Reference potential CAN bus
CAN bus low
Unit internal SBus terminating resistor
Reference potential CAN bus
CAN bus high
CAN bus high
Unit internal SBus terminating resistor
1) Only for CAN-based system bus. No function for EtherCAT-based system bus.
Terminal
Assignment
Brief description
6
9
5
1
Terminal
Assignment
Brief description
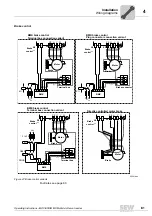
X2:PE
X2:1
X2:2
X2:3
PE
U
V
W
Motor connection sizes 1, 2
X2:PE
X2:1
X2:2
X2:3
PE
U
V
W
Motor connection size 3
X2:PE
X2:1
X2:2
X2:3
PE
U
V
W
Motor connection sizes 4, 5, 6
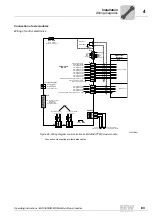
X4:PE
X4:1
X4:2
PE
+U
Z
- U
Z
DC link bus connection
X5a:1
X5a:2
+24 V
E
DGND
Voltage supply for electronics
X5a:3
X5a:4
+24 V
B
BGND
Voltage supply for brake supply
X5b:1
X5b:2
+24 V
E
DGND
Voltage supply for electronics
X5b:3
X5b:4
+24 V
B
BGND
Voltage supply for brake supply
X6:1
X6:2
DBØØ
BGND
Brake connection (switched)
Table continued on next page. Footnotes on next page.
PE
3
PE
3
PE
3
PE
2
1
4
1
4
1
2
Содержание MOVIAXIS MX
Страница 2: ...SEW EURODRIVE Driving the world...
Страница 210: ......
Страница 211: ...SEW EURODRIVE Driving the world...





















































