


























3 SIGNALS AND WIRING
3.6 Interface
89
3
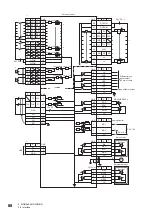
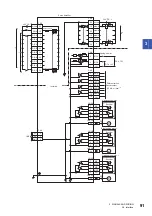
*1 P: Position control mode, S: Speed control mode, T: Torque control mode
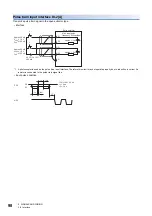
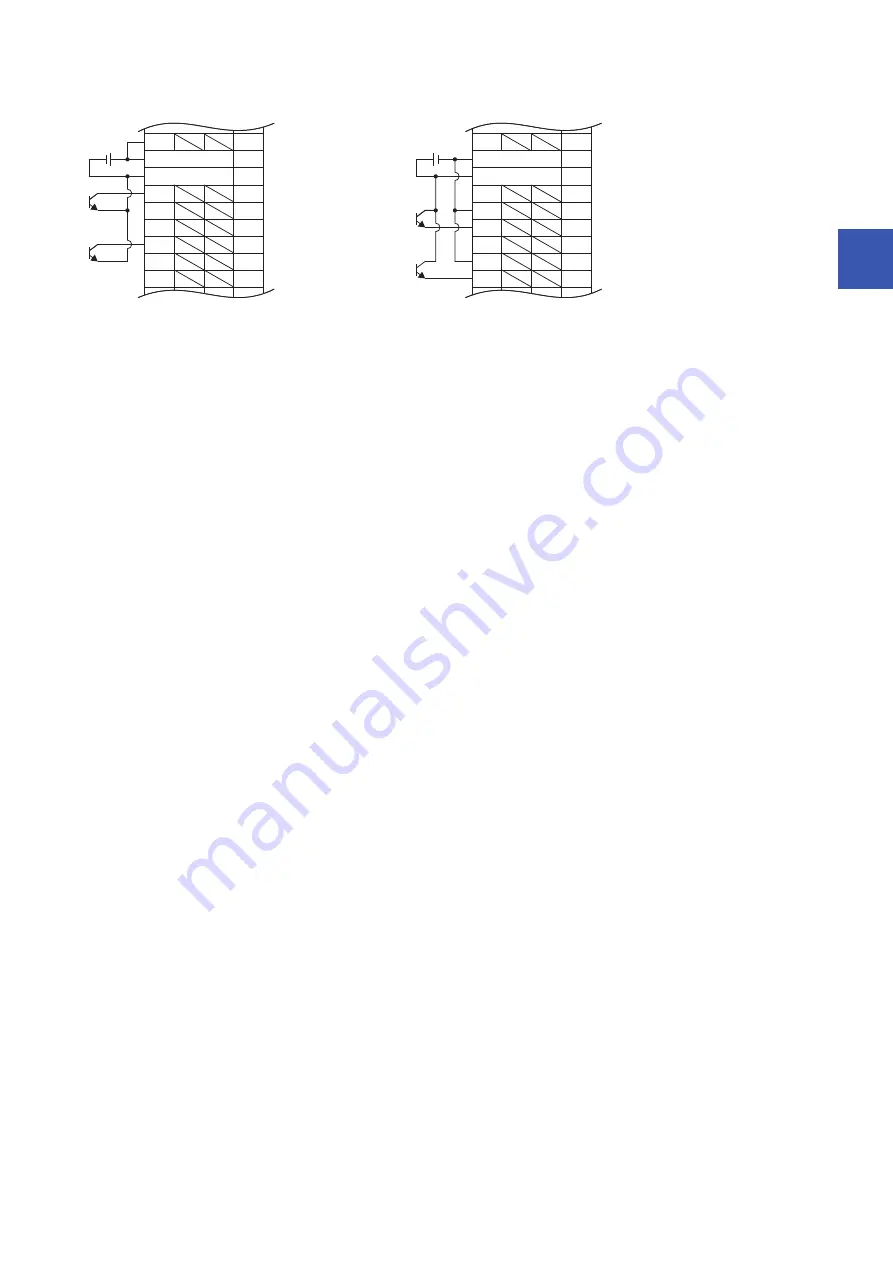
*2 This is for the differential line driver pulse train input. For the open-collector pulse train input, connect as follows.
*3 This diagram shows a sink I/O interface. For the source I/O interface, refer to the following.
*4 This is for the MR-J5-_A_-RJ_ servo amplifier. The MR-J5-_A_ servo amplifier does not have the CN2L connector.
*5 Although the diagram shows the input signal and the output signal each using a separate 24 V DC power supply for illustrative purposes,
the system can be configured to use a single 24 V DC power supply.
*6 Refer to "Parts identification" in User's Manual (Introduction) for connecting an external encoder.
*7 Output devices are not assigned by default. Assign the output devices with [Pr. PD47] as necessary.
*8 If the MR-J5-_A_-RJ_ is used, the values in the CN3-16 pin and the CN3-45 pin are approximately 4.3 k
Ω
.
*9 RS-422 and RS-485 are not supported.
DOCOM
OPC
12
20
47
PP
10
PG
11
NP
35
NG
36
DICOM
DOCOM
PP2
37
NP2
38
DOCOM
OPC
12
20
47
PP
10
PG
11
NP
35
NG
36
DICOM
DOCOM
PP2
37
NP2
38
24 V DC
24 V DC
For sink input interface
For source input interface
Содержание Melservo-J5 MR-J5 Series
Страница 1: ...MR J5 User s Manual Hardware MR J5 _G_ MR J5W_ _G_ MR J5 _A_ Mitsubishi Electric AC Servo System ...
Страница 2: ......
Страница 441: ...12 USING A FULLY CLOSED LOOP SYSTEM 12 7 Absolute position detection system 439 12 MEMO ...
Страница 445: ......







































































