





























346
10 USING A LINEAR SERVO MOTOR
10.4 Basic functions
Homing operation
Precautions
• To execute homing securely, move the linear servo motor to the opposite stroke end with the JOG operation from the
controller or by other means, then start homing.
• Change the setting value of [Pr. PL01.2 Homing stop interval setting] in accordance with the linear encoder resolution.
■
Incremental linear encoder
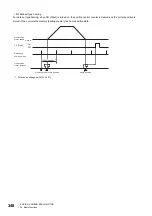
• When the linear encoder home position (reference mark) exists in the homing direction
In the case of a dog type homing, after the proximity dog signal rear end is detected, the nearest reference home position
shifted by the home position shift distance is used as the home position.
Set one linear encoder home position in the full stroke, and set it in the proximity dog signal detection position.
*1 This can be changed with [Pr. PL01].
*2 Home position shift distance can be changed with [Pr. PT07].
• When the linear encoder home position does not exist in the homing direction
If the homing is performed from the position where the linear encoder home position does not exist in the homing direction, an
error may occur. If an error occurs, change the homing method or move the linear servo motor to the stroke end on the
opposite side of the homing direction with operations such as the JOG operation from the controller, then start homing.
ON
OFF
0 mm/s
1048576 pulses
*1
Homing direction
Homing speed
Home position shift distance
Creep speed
Linear servo motor speed
Proximity dog signal
Reference home position
1048576 pulses × n + Home position shift distance
*2
Linear servo motor position
Linear encoder home position
Home position
ON
OFF
0 mm/s
Homing direction
Homing speed
Creep speed
Linear servo
motor speed
JOG operation
Proximity dog signal
Linear servo
motor position
Stroke end
Linear encoder home position
Home position
Home position returnable area
Home position non-returnable area
Содержание Melservo-J5 MR-J5 Series
Страница 1: ...MR J5 User s Manual Hardware MR J5 _G_ MR J5W_ _G_ MR J5 _A_ Mitsubishi Electric AC Servo System ...
Страница 2: ......
Страница 441: ...12 USING A FULLY CLOSED LOOP SYSTEM 12 7 Absolute position detection system 439 12 MEMO ...
Страница 445: ......







































































