




























44
3 SIGNALS AND WIRING
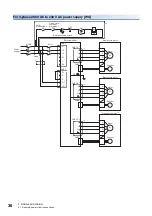
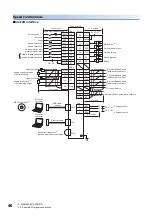
3.2 Example I/O signal connections
*1 To prevent an electric shock, connect the protective earth (PE) terminal (the terminal marked with the
symbol) of the servo amplifier
to the protective earth (PE) of the cabinet.
*2 Connect the diode in the correct direction. If it is connected reversely, the servo amplifier may malfunction and not output signals,
disabling protective circuits such as EM2 (Forced stop 2).
*3 Install a forced stop switch (normally closed contact).
*4 Supply 24 V DC ± 10 % to interfaces from outside. The total current capacity of these power supplies is 500 mA maximum. The
amperage will not exceed 500 mA when all I/O signals are used. Reducing the number of I/O points decreases the current capacity. For
the amperage required for interfaces, refer to the following.
Page 93 Digital input interface DI-1
Although the diagram shows the input signal and the output signal each using a separate 24 V DC power supply for illustrative purposes,
the system can be configured to use a single 24 V DC power supply.
*5 When starting operation, turn on EM2 (Forced stop 2), LSP (Forward rotation stroke end), and LSN (Reverse rotation stroke end)
(normally closed contact).
*6 If no alarm is occurring, ALM (Malfunction) is on (normally closed contact). If an alarm occurs, stop programmable controller's signals
with a sequence program.
*7 The pins with the same signal name are connected in the servo amplifier.
*8 This length applies when the command pulse train input is the differential line driver type. In the case of the open-collector type, connect
them within 2 m.
*9 Use SW1DNC-MRC2-_.
*10 This connection is not required when the positioning module is RD75D, LD75D, or QD75D. However, to enhance noise tolerance, it is
recommended to connect LG of the servo amplifier and control common.
*11 If not using the STO function, attach the short-circuit connector that came with the servo amplifier.
*12 To prevent an unexpected restart of the servo amplifier, configure a circuit that turns off EM2 when the main circuit power supply is
turned off.
*13 Noise or disconnection of the command cable connected to the controller may cause a position mismatch. To avoid the position
mismatch, check the encoder A-phase pulse and encoder B-phase pulse on the controller side.
*14 For source interfaces, the positive and negative outputs of the power supply are reversed as compared with sink interfaces.
*15 For source interfaces, CLEAR and CLEARCOM are reversed as compared with sink interfaces.
Содержание Melservo-J5 MR-J5 Series
Страница 1: ...MR J5 User s Manual Hardware MR J5 _G_ MR J5W_ _G_ MR J5 _A_ Mitsubishi Electric AC Servo System ...
Страница 2: ......
Страница 441: ...12 USING A FULLY CLOSED LOOP SYSTEM 12 7 Absolute position detection system 439 12 MEMO ...
Страница 445: ......







































































