




























10 USING A LINEAR SERVO MOTOR
10.6 Characteristics
359
10
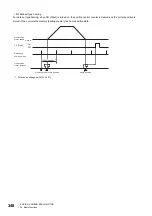
Calculation method of the amount of heat generated by the servo amplifier
Calculate the amount of heat generated by one servo amplifier from the following tables.
■
Amount of heat generated by one servo amplifier at rated output
*1 The values stated for heat generated by the servo amplifier do not take into account the heat generated during regeneration. To
calculate heat generated by the regenerative option, refer to the following.
■
Amount of heat generated by one servo amplifier for one linear servo motor
Servo amplifier
Servo amplifier-generated heat [W]
At servo-off (C)
At rated output
MR-J5W2-22G_
20
Sum of the total amount of heat generated by the servo amplifier for all linear servo
motors to be connected (B) and the amount of heat generated by the servo amplifier
at servo-off (C)
MR-J5W2-44G_
20
MR-J5W2-77G_
20
MR-J5W2-1010G_
20
MR-J5W3-222G_
25
MR-J5W3-444G_
25
Linear servo motor
Servo amplifier-generated heat [W] (B)
LM-H3P2A-07P-BSS0
35
LM-H3P3A-12P-CSS0
35
LM-H3P3B-24P-CSS0
50
LM-H3P3C-36P-CSS0
75
LM-H3P7A-24P-ASS0
50
LM-U2PAB-05M-0SS0
25
LM-U2PAD-10M-0SS0
35
LM-U2PAF-15M-0SS0
35
LM-U2PBB-07M-1SS0
25
LM-U2PBD-15M-1SS0
40
LM-U2PBF-22M-1SS0
50
LM-K2P1A-01M-2SS1
35
LM-K2P2A-02M-1SS1
50
LM-AJP1B-07K-JSS0
35
LM-AJP1D-14K-JSS0
50
LM-AJP2B-12S-JSS0
35
LM-AJP2D-23T-JSS0
50
LM-AJP3B-17N-JSS0
35
LM-AJP3D-35R-JSS0
50
LM-AJP4B-22M-JSS0
35
LM-AJP4D-45N-JSS0
50
Содержание Melservo-J5 MR-J5 Series
Страница 1: ...MR J5 User s Manual Hardware MR J5 _G_ MR J5W_ _G_ MR J5 _A_ Mitsubishi Electric AC Servo System ...
Страница 2: ......
Страница 441: ...12 USING A FULLY CLOSED LOOP SYSTEM 12 7 Absolute position detection system 439 12 MEMO ...
Страница 445: ......







































































