




























12 USING A FULLY CLOSED LOOP SYSTEM
12.2 Functions and configuration
415
12
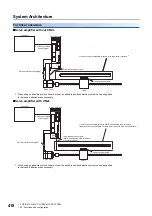
Function block diagram
Fully closed loop system block diagram
A fully closed loop system block diagram is shown below. For a fully closed loop system, the position is controlled in the units
of the load-side encoder.
■
MR-J5-_G_/MR-J5W_-_G_
■
MR-J5-_A_
*1 A switch between semi closed loop control and fully closed loop control can be set with [Pr. PE01.0 Fully closed loop function selection].
For semi closed loop control, regardless of whether the servo motor stops or rotates, the position is always controlled based on servo
motor encoder position information.
*2 For fully closed loop control, dual feedback control, which combines servo motor feedback signals and load-side encoder feedback
signals, can be enabled with [Pr. PE08 Fully closed loop dual feedback filter]. When dual feedback control is enabled, the control
performance is improved by switching the control method to fully closed loop control when the servo motor is stopped and to semi
closed loop control when the servo motor is operating. When [Pr. PE08] is set to "4500", fully closed loop control is always enabled.
FBD
+
-
FBN
CDV
CMX
S
+
-
+
-
+
+
-
+
-
+
Servo motor-side
feedback pulses
(load-side resolution unit)
(Servo motor-side)
Droop pulses
(Servo motor-side)
Cumulative feedback
pulses
Load-side encoder
droop pulses
Load-side encoder
cumulative feedback
pulses
Fully closed loop
dual feedback
filter ([Pr. PE08])
*2
Servo motor
Linear encoder
Controller
Electronic gear
Fully closed loop function selection
([Pr. PE01.0])
*1
Encoder pulse setting
([Pr. PA15], [Pr. PA16],
and [Pr. PC03])
Fully closed loop control
error - Detection function
selection ([Pr. PE03.0])
Control
Monitor
Load-side feedback pulses
FBD
+
-
FBN
CDV
CMX
S
+
-
+
-
+
+
-
+
-
+
Servo motor-side
feedback pulses
(load-side resolution unit)
(Servo motor-side)
Droop pulses
(Servo motor-side)
Cumulative feedback
pulses
Load-side encoder
droop pulses
Load side encoder
cumulative feedback
pulses
Fully closed loop
dual feedback filter
([Pr. PE08])
*2
Servo motor
Linear encoder
Controller
Electronic gear
Encoder pulse setting
([Pr. PA15], [Pr. PA16],
and [Pr. PC19])
Fully closed loop control
error - Detection function
selection ([Pr. PE03.0])
Control
Monitor
Load-side feedback pulse
Fully closed loop function selection
([Pr. PE01.0])
*1
Содержание Melservo-J5 MR-J5 Series
Страница 1: ...MR J5 User s Manual Hardware MR J5 _G_ MR J5W_ _G_ MR J5 _A_ Mitsubishi Electric AC Servo System ...
Страница 2: ......
Страница 441: ...12 USING A FULLY CLOSED LOOP SYSTEM 12 7 Absolute position detection system 439 12 MEMO ...
Страница 445: ......







































































