


























Scanner Maintenance
Drive belt system
9.6. Drive belt system
9.6.1. Inspecting the drive belts
Inspect the drive belts looking for
•
Excess wear on teeth or belt edges
•
Exposed fiber strands
9.6.2. Replacing the motor drive belt
To replace the motor drive belt (see Figure 9-4):
1.
Remove the beam covers adjacent to the cable end support using
the procedure described in Subsection 9.1.7.
WARNING
:
To perform any maintenance, troubleshooting, or
replacement of components, ensure that power is
disabled at the breaker.
2.
Scan the heads offsheet on the cable end of the scanner and turn off
the Motor Power keyswitch (see Figure 9-9).
3.
Loosen the encoder and slide it away from the motor drive belt.
4.
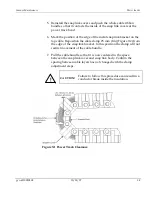
Remove the motor drive belt. This can be achieved by loosening the
3/8"-16 motor bracket fastening bolts and turning the belt adjuster
bolt counterclockwise to loosen the belt tension. Slide the belt off
the large-toothed gear and then remove it from the motor pulley.
5.
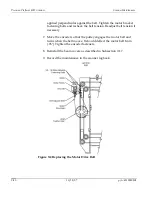
Install the new motor drive belt by placing the belt over the small
pulley on the drive motor, then placing the belt on the large
toothed gear and slowly rotating the gear until the belt is seated.
6.
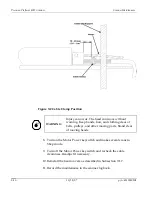
Adjust the tension of the motor belt by using the belt adjuster bolt
located below the motor. The motor bracket attachment bolts must
be loosened before adjustments can be made. The encoder fasteners
must be loose and the encoder pushed away from the motor belt.
The motor belt should deflect 3 mm (1/8") with a 1.4 kg (3 lb) force
p/n 6510020208
10/18/07
9-19
Содержание 4022
Страница 1: ...Precision Platform 4022 Scanner System Manual 6510020208 ...
Страница 2: ......
Страница 3: ...Precision Platform 4022 Scanner October 2007 ...
Страница 22: ......
Страница 72: ......
Страница 94: ......
Страница 126: ......
Страница 162: ......
Страница 170: ......
Страница 221: ...Scanner Maintenance Heads and sensors Figure 9 10 High Pressure Air Manifold p n 6510020208 10 18 07 9 45 ...
Страница 234: ......
Страница 239: ...Glossary p n 6510020208 10 18 07 11 5 VIO Virtual Input Output ...







































































