





























Chapter 12
■
•
•
Output
frequency
Chapter 12
■
Teaching Function
•
Function to rotate and stop a motor and store the
position as a position command at any position
command area.
• Assign 110[TCH].
When the [AA123] vector control
02 (absolute position control) or 03 (high resolution
absolute position cont
functioning.
(1) Select the position command to set at the
[AE-60] teaching selection.
(2) Operate the work.
• Enter the operation command while the
[TCH] terminal is on.
command and acceleration/deceleration
command at this time, those selected at that
time are followed.
(3) Once the desired position is reached, press
the save (2 key) on the operator keypad.
(4) The current position is set in the are
corresponding to the position command
destination set to the [AE
selection. (However, [AE
saved. After power
becomes 00
[AE-60] setting
value
00
01
02
03
04
05
06
07
08
09
10
11
12
13
14
15
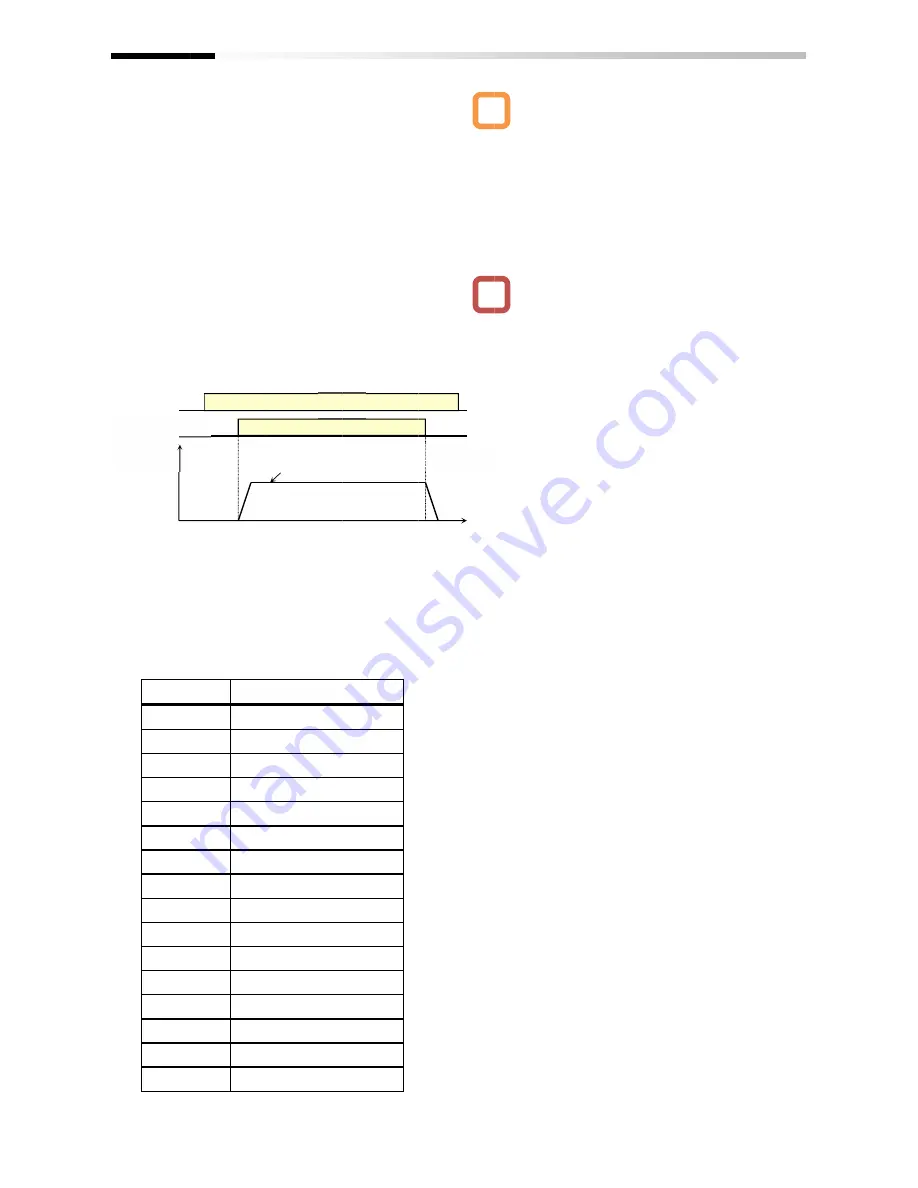
TCH terminal
Operation
command
Output
frequency
Chapter 12
Teaching Function
Function to rotate and stop a motor and store the
position as a position command at any position
command area.
Assign 110[TCH].
When the [AA123] vector control
02 (absolute position control) or 03 (high resolution
absolute position control), the teaching terminal is
functioning.
Select the position command to set at the
60] teaching selection.
Operate the work.
Enter the operation command while the
[TCH] terminal is on.
command and acceleration/deceleration
command at this time, those selected at that
time are followed.
Once the desired position is reached, press
the save (2 key) on the operator keypad.
The current position is set in the are
corresponding to the position command
destination set to the [AE
selection. (However, [AE
saved. After power
becomes 00 (X00).)
setting
value
Position command to be set
00
[AE-20]
command 0
01
[AE-22]
command 1
02
[AE-24]
command 2
03
[AE-26]
command 3
04
[AE-28]
command 4
05
[AE-30]
command 5
06
[AE-32]
command 6
07
[AE-34]
command 7
08
[AE-36]
command 8
09
[AE-38]
command 9
10
[AE-40]
command 10
[AE-42]
command 11
12
[AE-44]
command 12
13
[AE-46]
command 13
14
[AE-48]
command 14
15
[AE-50]
command 15
The speed command selected at that time
is followed.
Function to rotate and stop a motor and store the
position as a position command at any position
When the [AA123] vector control mode selection is
02 (absolute position control) or 03 (high resolution
rol), the teaching terminal is
Select the position command to set at the
60] teaching selection.
Operate the work.
Enter the operation command while the
[TCH] terminal is on. • For the speed
command and acceleration/deceleration
command at this time, those selected at that
time are followed.
Once the desired position is reached, press
the save (2 key) on the operator keypad.
The current position is set in the are
corresponding to the position command
destination set to the [AE-60] teaching
selection. (However, [AE-60] itself is not
saved. After power-off or the reset, it
(X00).)
Position command to be set
20]: Multistage position
command 0
22]: Multistage position
command 1
24]: Multistage position
command 2
26]: Multistage position
command 3
28]: Multistage position
command 4
30]: Multistage position
command 5
32]: Multistage position
command 6
34]: Multistage position
command 7
36]: Multistage position
command 8
38]: Multistage position
command 9
40]: Multistage position
command 10
42]: Multistage position
command 11
44]: Multistage position
command 12
46]: Multistage position
command 13
48]: Multistage position
command 14
50]: Multistage position
command 15
ON
ON
The speed command selected at that time
is followed.
12
Function to rotate and stop a motor and store the
position as a position command at any position
mode selection is
02 (absolute position control) or 03 (high resolution
rol), the teaching terminal is
Select the position command to set at the
Enter the operation command while the
For the speed
command and acceleration/deceleration
command at this time, those selected at that
Once the desired position is reached, press
the save (2 key) on the operator keypad.
The current position is set in the are
corresponding to the position command
60] teaching
60] itself is not
off or the reset, it
Position command to be set
: Multistage position
: Multistage position
: Multistage position
: Multistage position
position
: Multistage position
: Multistage position
: Multistage position
: Multistage position
: Multistage position
Multistage position
: Multistage position
: Multistage position
: Multistage position
: Multistage position
: Multistage position
ON
ON
The speed command selected at that time
12-17-28
Function to rotate and stop a motor and store the
position as a position command at any position
mode selection is
02 (absolute position control) or 03 (high resolution
rol), the teaching terminal is
Select the position command to set at the
command at this time, those selected at that
Once the desired position is reached, press
• If the power supply of the inverter control circuit
(R0,T0) is input, the teaching is allowed.
operating the work with an external unit, etc. also
enables the current position counter to work, the
teaching is allowed even if the operation is
performed without an inverter.
• However, make sure that the power supply of the
inverter power circuit (R, S, T) is shut off.
sure that the connection between the output of the
inverter (U, V, W) and the motor is shut off.
Otherwise, yo
A
!
Position
The speed command selected at that time
28
If the power supply of the inverter control circuit
(R0,T0) is input, the teaching is allowed.
operating the work with an external unit, etc. also
enables the current position counter to work, the
teaching is allowed even if the operation is
performed without an inverter.
However, make sure that the power supply of the
inverter power circuit (R, S, T) is shut off.
sure that the connection between the output of the
inverter (U, V, W) and the motor is shut off.
Otherwise, yo
A
If the power supply of the inverter control circuit
(R0,T0) is input, the teaching is allowed.
operating the work with an external unit, etc. also
enables the current position counter to work, the
teaching is allowed even if the operation is
performed without an inverter.
However, make sure that the power supply of the
inverter power circuit (R, S, T) is shut off.
sure that the connection between the output of the
inverter (U, V, W) and the motor is shut off.
Otherwise, you run the risk of injury and damage.
Inverter Functions
If the power supply of the inverter control circuit
(R0,T0) is input, the teaching is allowed.
operating the work with an external unit, etc. also
enables the current position counter to work, the
teaching is allowed even if the operation is
performed without an inverter.
However, make sure that the power supply of the
inverter power circuit (R, S, T) is shut off.
sure that the connection between the output of the
inverter (U, V, W) and the motor is shut off.
u run the risk of injury and damage.
Inverter Functions
If the power supply of the inverter control circuit
(R0,T0) is input, the teaching is allowed. Since
operating the work with an external unit, etc. also
enables the current position counter to work, the
teaching is allowed even if the operation is
However, make sure that the power supply of the
inverter power circuit (R, S, T) is shut off. •Or make
sure that the connection between the output of the
inverter (U, V, W) and the motor is shut off.
u run the risk of injury and damage.
Inverter Functions
Or make
Содержание SJ Series
Страница 39: ...5 4 Chapter 5 Included Items Memo ...
Страница 52: ...6 13 Chapter 6 Installation Model P1 P1 200V class P1 02950 L P1 550L Dimension W mm H mm D mm 480 700 250 ...
Страница 55: ...6 16 Chapter 6 Installation Memo ...
Страница 91: ...7 36 Chapter 7 Wire Connection and Optional Devices Memo ...
Страница 135: ...9 40 Chapter 9 Operating Instructions Memo ...
Страница 145: ...10 10 Chapter 10 Test Run Memo ...
Страница 159: ...12 2 6 Chapter 12 Inverter Functions Memo ...
Страница 169: ...12 3 10 Chapter 12 Inverter Functions Memo ...
Страница 195: ...12 5 8 Chapter 12 Inverter Functions Memo ...
Страница 217: ...12 8 12 Chapter 12 Inverter Function Memo ...
Страница 287: ...12 10 32 Chapter 12 Inverter Functions Memo ...
Страница 303: ...12 11 16 Chapter 12 Inverter Functions Memo ...
Страница 349: ...12 15 8 Chapter 12 Inverter Function Memo ...
Страница 395: ...12 17 34 Chapter 12 Inverter Functions Memo ...
Страница 397: ...12 18 2 Chapter 12 Inverter Functions Memo ...
Страница 415: ...12 19 18 Chapter 12 Inverter Function Memo ...
Страница 581: ...15 10 Chapter 15 Optional Cassettes Memo ...
Страница 591: ...16 10 Chapter 16 ProDriveNext EzSQ Memo ...
Страница 642: ...18 49 Chapter 18 Tips FAQ Troubleshooting Memo ...
Страница 650: ...19 8 Chapter 19 Maintenance and Inspection Memo ...
Страница 661: ...20 11 Chapter 20 Specifications Model P1 P1 200V class 02950 L 550L Dimension W mm H mm D mm 700 480 250 ...
Страница 662: ...20 12 Chapter 20 Specifications Model P1 P1 400V class 01760 H 750H 02130 H 900H Dimension W mm H mm D mm 390 700 270 ...
Страница 663: ...20 13 Chapter 20 Specifications Model P1 P1 400V class 02520 H 1100H 03160 H 1320H Dimension W mm H mm D mm 480 740 270 ...
Страница 678: ...21 7 Chapter 21 Technical Notes SJ700D SJ P1 ND normal duty SJ700D 550LFF3 P1 02950 LFEF P1 550LFF ...
Страница 686: ...21 15 Chapter 21 Technical Notes SJ700B SJ P1 LD low duty VLD very low duty SJ700B 750LFF P1 02950 LFEF P1 550LFF ...
Страница 781: ...Appendix 1 70 Appendix 1 List of Parameters Memo ...







































































