





























12-17-20
Chapter 12
Inverter Functions
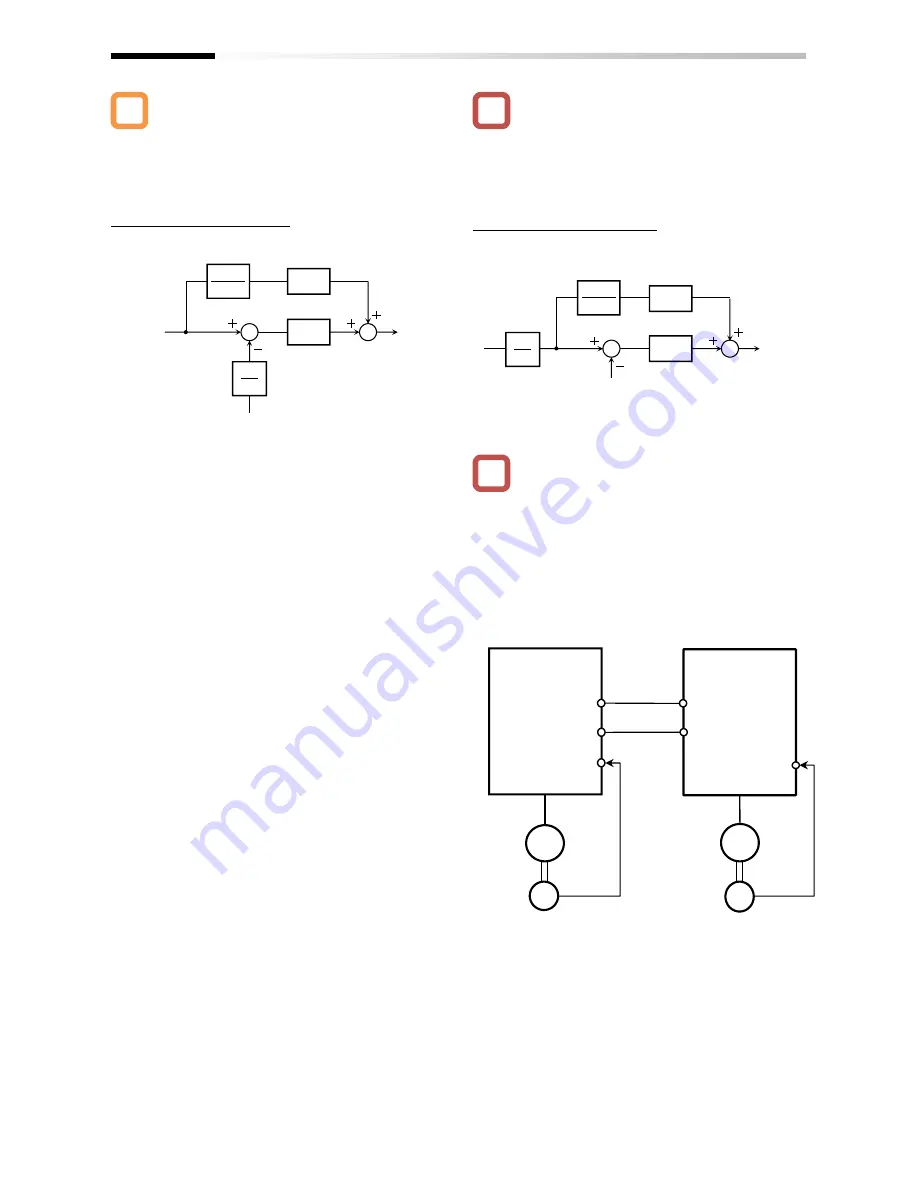
Electronic Gear Function
• This function enables you to set the gain for the
position command or position feedback to change
the rotation ratio of the main and sub motors when
performs the synchronous operation.
[AE-01] = 00 (feedback side)
Example of Synchronous Operation between
Master and Slave
• The master unit is operable with any control
methods ([AA121]).
• The salve unit performs the pulse train position
control with vector control.
([AA121]=10,[AA123]=01,[ob-10]=01)
• Assign the 073[STAT] pulse train position
command input permission to an unused input
terminal and turn on the terminal.
When the 073[STAT] is off, the pulse train input is
not accepted.
<Setting Examples>
•Main motor: Number of encoder pulses is 1024
•Sub motor: Number of encoder pulses is 3000
•Main motor rotation speed : sub motor rotation speed =2 :
1
For the operation with the above conditions, set the
following data to the slave unit.
[ob-11] Pulse train input mode selection: 00
[AE-01] Electronic gear installation position: 01 (REF)
[AE-02]Electronic gear ratio numerator: 3000
[AE-03]Electronic gear ratio denominator: 1024 × 2 =
2048
• The encoder output [AP][BP][AN][BN] of the main
motor is retrieved as the pulse train position
command [SAP][SBP][SAN] [SBN] of the slave unit.
• When the main motor speed is high, the change
amount of the pulse per unit time is getting large
and the speed command of the slave unit is also
getting large. •When the main motor speed is low,
the speed command of the slave unit is also getting
small.
• This causes the sub motor follows the main motor
to operate.
• Make sure that the setting of N/D is in the range of
1/50
≤
N/D
≤
20.
N: [AE-02] Electronic gear ratio numerator
D: [AE-03] Electronic gear ratio denominator
[AE-01] = 01 (command side)
• If the follow-up response on the slave side is slow,
adjust by raising the [AE-06] feed forward gain or
[AE-07] position loop gain.
A
!
!
<Master unit>
AP,BP
AN,BN
<Slave unit>
M
EN
M
EN
Main
Motor
Sub
Motor
EG
EAP,EBP
EAN,EBN
SAP,SBP
SAN,SBN
EG
EAP,EBP
EAN,EBN
Position loop gain
AE-07
AE-06
Feed forward gain
Position
command
N
D
Position feedback
Speed
command
Electronic
1+sT
1
Primary delay
filter
Position
command
Position loop gain
AE-07
AE-06
Feed forward gain
N
D
Position feedback
Speed
command
Electronic
gear
1+sT
1
Primary delay
filter
Содержание SJ Series
Страница 39: ...5 4 Chapter 5 Included Items Memo ...
Страница 52: ...6 13 Chapter 6 Installation Model P1 P1 200V class P1 02950 L P1 550L Dimension W mm H mm D mm 480 700 250 ...
Страница 55: ...6 16 Chapter 6 Installation Memo ...
Страница 91: ...7 36 Chapter 7 Wire Connection and Optional Devices Memo ...
Страница 135: ...9 40 Chapter 9 Operating Instructions Memo ...
Страница 145: ...10 10 Chapter 10 Test Run Memo ...
Страница 159: ...12 2 6 Chapter 12 Inverter Functions Memo ...
Страница 169: ...12 3 10 Chapter 12 Inverter Functions Memo ...
Страница 195: ...12 5 8 Chapter 12 Inverter Functions Memo ...
Страница 217: ...12 8 12 Chapter 12 Inverter Function Memo ...
Страница 287: ...12 10 32 Chapter 12 Inverter Functions Memo ...
Страница 303: ...12 11 16 Chapter 12 Inverter Functions Memo ...
Страница 349: ...12 15 8 Chapter 12 Inverter Function Memo ...
Страница 395: ...12 17 34 Chapter 12 Inverter Functions Memo ...
Страница 397: ...12 18 2 Chapter 12 Inverter Functions Memo ...
Страница 415: ...12 19 18 Chapter 12 Inverter Function Memo ...
Страница 581: ...15 10 Chapter 15 Optional Cassettes Memo ...
Страница 591: ...16 10 Chapter 16 ProDriveNext EzSQ Memo ...
Страница 642: ...18 49 Chapter 18 Tips FAQ Troubleshooting Memo ...
Страница 650: ...19 8 Chapter 19 Maintenance and Inspection Memo ...
Страница 661: ...20 11 Chapter 20 Specifications Model P1 P1 200V class 02950 L 550L Dimension W mm H mm D mm 700 480 250 ...
Страница 662: ...20 12 Chapter 20 Specifications Model P1 P1 400V class 01760 H 750H 02130 H 900H Dimension W mm H mm D mm 390 700 270 ...
Страница 663: ...20 13 Chapter 20 Specifications Model P1 P1 400V class 02520 H 1100H 03160 H 1320H Dimension W mm H mm D mm 480 740 270 ...
Страница 678: ...21 7 Chapter 21 Technical Notes SJ700D SJ P1 ND normal duty SJ700D 550LFF3 P1 02950 LFEF P1 550LFF ...
Страница 686: ...21 15 Chapter 21 Technical Notes SJ700B SJ P1 LD low duty VLD very low duty SJ700B 750LFF P1 02950 LFEF P1 550LFF ...
Страница 781: ...Appendix 1 70 Appendix 1 List of Parameters Memo ...







































































