





























12-9-16
Chapter 12
Inverter Function
12.9.11
Use vector control with sensor
• To conduct highly accurate control on the motor
with encoder feedback.
• To use the position control function.
• The feedback of the encoder signal from the motor
allows highly accurate frequency control from the
low-speed range.
• In the vector control with sensor, to control the
motor, the frequency and the output voltage are
corrected and the response is adjusted with
respect to the load inertia.
Accordingly, it requires the acquisition of the motor
constant and the load inertia by means of
auto-tuning or the like.
• In the vector control with sensor, adjustment of the
response is possible. The vector control with
sensor can be used in applications that require a
better follow-up performance of the speed to the
command.
• In the vector control with sensor, the position
control mode can be used.
• Even in the case of Hitachi's standard motors, a
large load inertia and/or a long wiring may require
the auto-tuning.
• Use of other motors than Hitachi's standard motors
requires the setting-up of the motor constant and
the load inertia by, for example conducting the
auto-tuning.
• When a motor is hunting and vibrating, an
adjustment of the speed response [HA115] may
improve the state of the motor.
Parameter
• Conducting the vector control with sensor requires
the encoder feedback from the motor.
• When [CA-90] = 02, Input terminals [A] and [B] are
switched to the terminals for feedback control.
When [CA-90]
≠
02, terminals [EAP], [EBP], [EAN],
and [EBN] of the feedback option P1-FB are
enabled.
See "12.9.17 Use encoder."
• In the vector control with sensor, set appropriately
the motor capacity, the number of motor poles, the
base frequency, the rated voltage, and the rated
current in order to conduct motor control.
• As the motor's frame number becomes smaller and
smaller from the one of the maximum applicable
motor, sufficient operation characteristics becomes
more difficult to get.
• In the case of a long wiring (approximately longer
than 20 m) and in the case of controlling motors
other than out company's, the performance may be
below what are expected from the characteristics.
• As the motor's frame number becomes smaller and
smaller from the one of the maximum applicable
motor, sufficient operation characteristics becomes
more difficult to get.
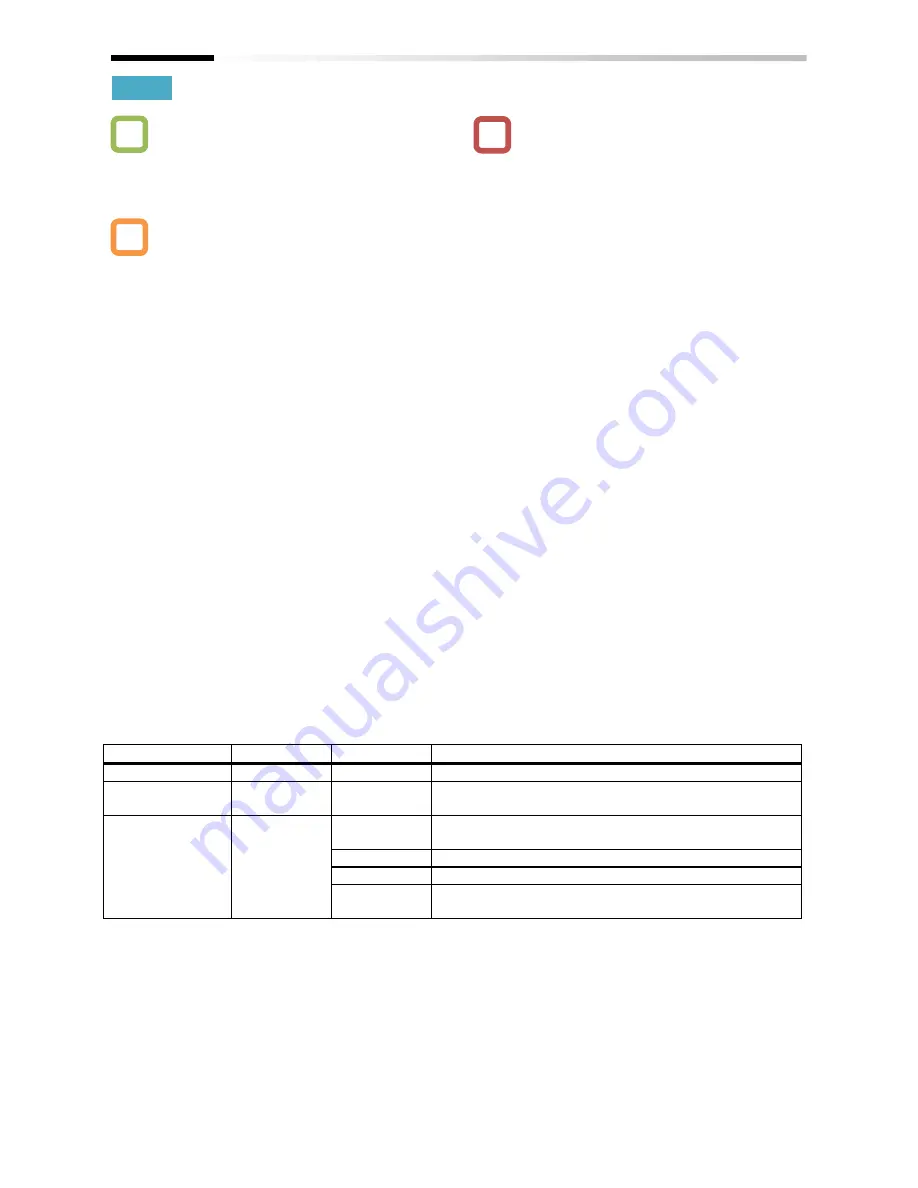
Item
Parameter
Data
Description
Control mode
[AA121]
10
To use the vector control with sensor (IM).
Speed response
[HA115]
0~1000(%)
To adjust the responsiveness of the control. A larger
value enhances the responsiveness.
Vector control
mode selection
[AA123]
00
Operation is possible by switching between the speed
control and the torque control.
01
Activate the pulse train position control mode.
02
Activate the absolute position control mode.
03
Activate the high-resolution absolute position control
mode.
Q
A
!
Содержание SJ Series
Страница 39: ...5 4 Chapter 5 Included Items Memo ...
Страница 52: ...6 13 Chapter 6 Installation Model P1 P1 200V class P1 02950 L P1 550L Dimension W mm H mm D mm 480 700 250 ...
Страница 55: ...6 16 Chapter 6 Installation Memo ...
Страница 91: ...7 36 Chapter 7 Wire Connection and Optional Devices Memo ...
Страница 135: ...9 40 Chapter 9 Operating Instructions Memo ...
Страница 145: ...10 10 Chapter 10 Test Run Memo ...
Страница 159: ...12 2 6 Chapter 12 Inverter Functions Memo ...
Страница 169: ...12 3 10 Chapter 12 Inverter Functions Memo ...
Страница 195: ...12 5 8 Chapter 12 Inverter Functions Memo ...
Страница 217: ...12 8 12 Chapter 12 Inverter Function Memo ...
Страница 287: ...12 10 32 Chapter 12 Inverter Functions Memo ...
Страница 303: ...12 11 16 Chapter 12 Inverter Functions Memo ...
Страница 349: ...12 15 8 Chapter 12 Inverter Function Memo ...
Страница 395: ...12 17 34 Chapter 12 Inverter Functions Memo ...
Страница 397: ...12 18 2 Chapter 12 Inverter Functions Memo ...
Страница 415: ...12 19 18 Chapter 12 Inverter Function Memo ...
Страница 581: ...15 10 Chapter 15 Optional Cassettes Memo ...
Страница 591: ...16 10 Chapter 16 ProDriveNext EzSQ Memo ...
Страница 642: ...18 49 Chapter 18 Tips FAQ Troubleshooting Memo ...
Страница 650: ...19 8 Chapter 19 Maintenance and Inspection Memo ...
Страница 661: ...20 11 Chapter 20 Specifications Model P1 P1 200V class 02950 L 550L Dimension W mm H mm D mm 700 480 250 ...
Страница 662: ...20 12 Chapter 20 Specifications Model P1 P1 400V class 01760 H 750H 02130 H 900H Dimension W mm H mm D mm 390 700 270 ...
Страница 663: ...20 13 Chapter 20 Specifications Model P1 P1 400V class 02520 H 1100H 03160 H 1320H Dimension W mm H mm D mm 480 740 270 ...
Страница 678: ...21 7 Chapter 21 Technical Notes SJ700D SJ P1 ND normal duty SJ700D 550LFF3 P1 02950 LFEF P1 550LFF ...
Страница 686: ...21 15 Chapter 21 Technical Notes SJ700B SJ P1 LD low duty VLD very low duty SJ700B 750LFF P1 02950 LFEF P1 550LFF ...
Страница 781: ...Appendix 1 70 Appendix 1 List of Parameters Memo ...







































































