





























ID 442426.04
67
WE KEEP THINGS MOVING
Technical data
4
Manual SD6
4.12.2
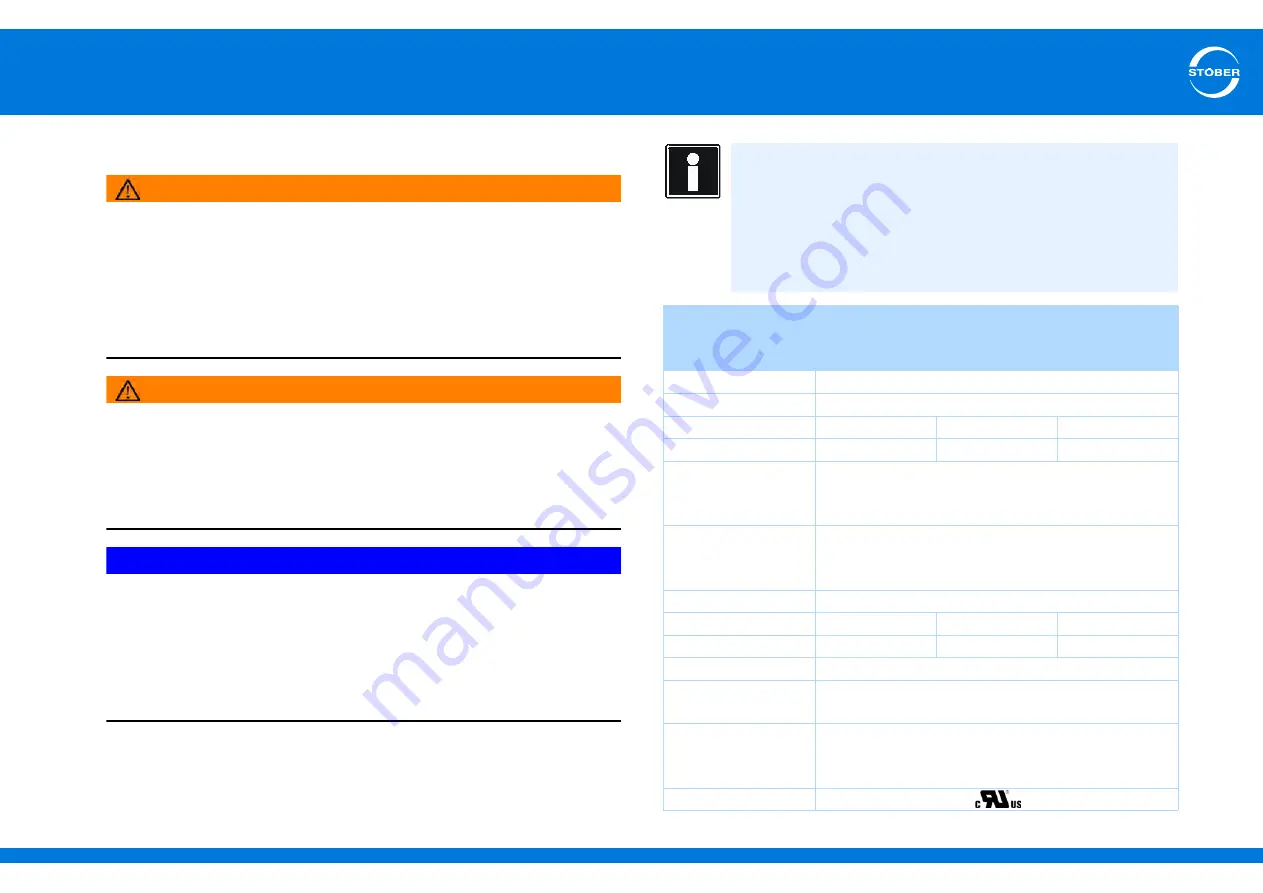
Output derater
WARNING!
Risk of burns! Fire hazard! Material damage!
Chokes can heat up to over 100 °C under permitted operating conditions.
Take protective measures against accidental and intentional contact with
the choke.
Make sure that no flammable material is in the vicinity of the choke.
Do not install chokes under or near the drive controller.
WARNING!
Fire hazard!
Using chokes outside of the nominal data (cable length, current, frequency,
etc.) can cause the chokes to overheat.
Always comply with the maximum nominal data when operating the
chokes.
NOTICE
Danger of machine standstill!
The motor temperature sensor evaluation is malfunctioning due to cable
capacities.
If you use cables which are longer than 50 m and the cables are not from
STOBER, the cores for the motor temperature sensor and the brake must
be separate (maximum length: 100 m).
Information
The following technical data applies for a rotary field frequency of
200 Hz. For example, this rotary field frequency is achieved with a
motor with 4 pole pairs and a nominal speed of 3000 rpm.
Always observe the specified derating for higher rotary field
frequencies.
Also observe the dependency of the cycle frequency.
Type
TEP3720-
0ES41
TEP3820-
0CS41
TEP4020-
0RS41
ID no.
53188
53189
53190
Voltage range
3 x 0 to 480 V
Frequency range
0 to 200 Hz
I
N
at 4 kHz
4 A
17.5 A
38 A
I
N
at 8 kHz
3.3 A
15.2 A
30.4 A
Max. permitted motor
cable length with
output derater
100 m
Max. surrounding
temperature
ϑ
amb,max
40 °C
Design
Open
Winding losses
11 W
29 W
61 W
Iron losses
25 W
16 W
33 W
Connections
Screw terminals
Max. conductor
cross-section
10 mm
2
UL Recognized
Component
(CAN; USA)
Yes
Test marks





















































