





























-54-
No. JXC
※
-OMT0002-C
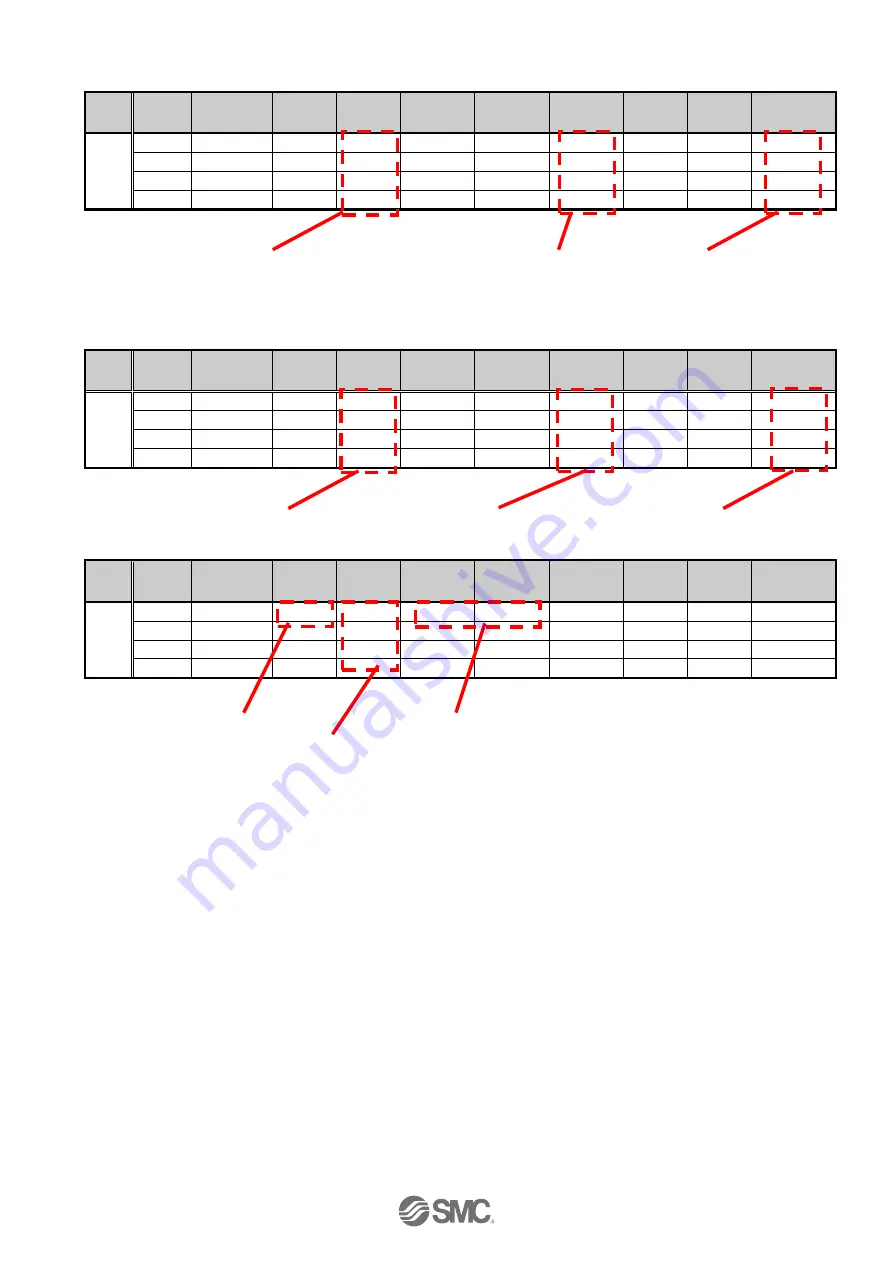
Different settings for each movement mode are shown below.
(1) ABS
Step
No.
Axis
Movement
mode
Speed
(mm/s)
Position
(mm)
Acceleration
(mm/s
2
)
Deceleration
(mm/s
2
)
Pushing
Selection
Area 1
(mm)
Area 2
(mm)
In-position
(mm)
0
Axis 1
Absolute
100
200.00
1000
1000
0
6.0
12.0
0.5
Axis 2
Absolute
50
100.00
1000
1000
0
6.0
12.0
0.5
Axis 3
Absolute
100
100.00
1000
1000
1
0.0
0.0
5.0
Axis 4
Absolute
50
50.0
1000
1000
1
0.0
0.0
10.0
(2) INC
Step
No.
Axis
Movement
mode
Speed
(mm/s)
Position
(mm)
Acceleration
(mm/s
2
)
Deceleration
(mm/s
2
)
Pushing
Selection
Area 1
(mm)
Area 2
(mm)
In-position
(mm)
0
Axis 1
Relative
100
200.00
1000
1000
0
6.0
12.0
0.5
Axis 2
Relative
50
100.00
1000
1000
0
6.0
12.0
0.5
Axis 3
Relative
100
100.00
1000
1000
1
0.0
0.0
5.0
Axis 4
Relative
50
50.0
1000
1000
1
0.0
0.0
10.0
(3) LIN-A / LIN-I
Step
No.
Axis
Movement
mode
Speed
(mm/s)
Position
(mm)
Acceleration
(mm/s
2
)
Deceleration
(mm/s
2
)
Pushing
Selection
Area 1
(mm)
Area 2
(mm)
In-position
(mm)
0
Axis 1
LIN-A
100
200.00
1000
1000
-
0.0
0.0
0.5
Axis 2
LIN-A
-
100.00
-
-
-
0.0
0.0
0.5
Axis 3
LIN-A
-
100.00
-
-
-
0.0
0.0
0.5
Axis 4
-
Note2)
-
-
-
-
-
-
-
-
Note 1) For LIN-I, the specified target position is a relative position.
Note 2) For LIN-A and LIN-I, Axis 1 to Axis 3 are based on interpolation. Do not perform a setting
for Axis 4.
0: Positioning operation
1: Pushing operation
Positioning: In-position
Pushing: Max.pushing distance
Positioning: Target position (Absolute position)
Pushing: Position of pushing start (Absolute position)
0: Positioning operation
1: Pushing operation
Positioning: In-position
Pushing: Max.pushing distance
Positioning: Target position (Relative position)
Pushing: Position of pushing start (Relative position)
Composite speed
Target position (Absolute position)
Note 1
Composite acceleration and deceleration speed







































































