





























5-33
5-10 User Parameters
5
Operating Functions
Set the control mode to be used.
Explanation of Settings
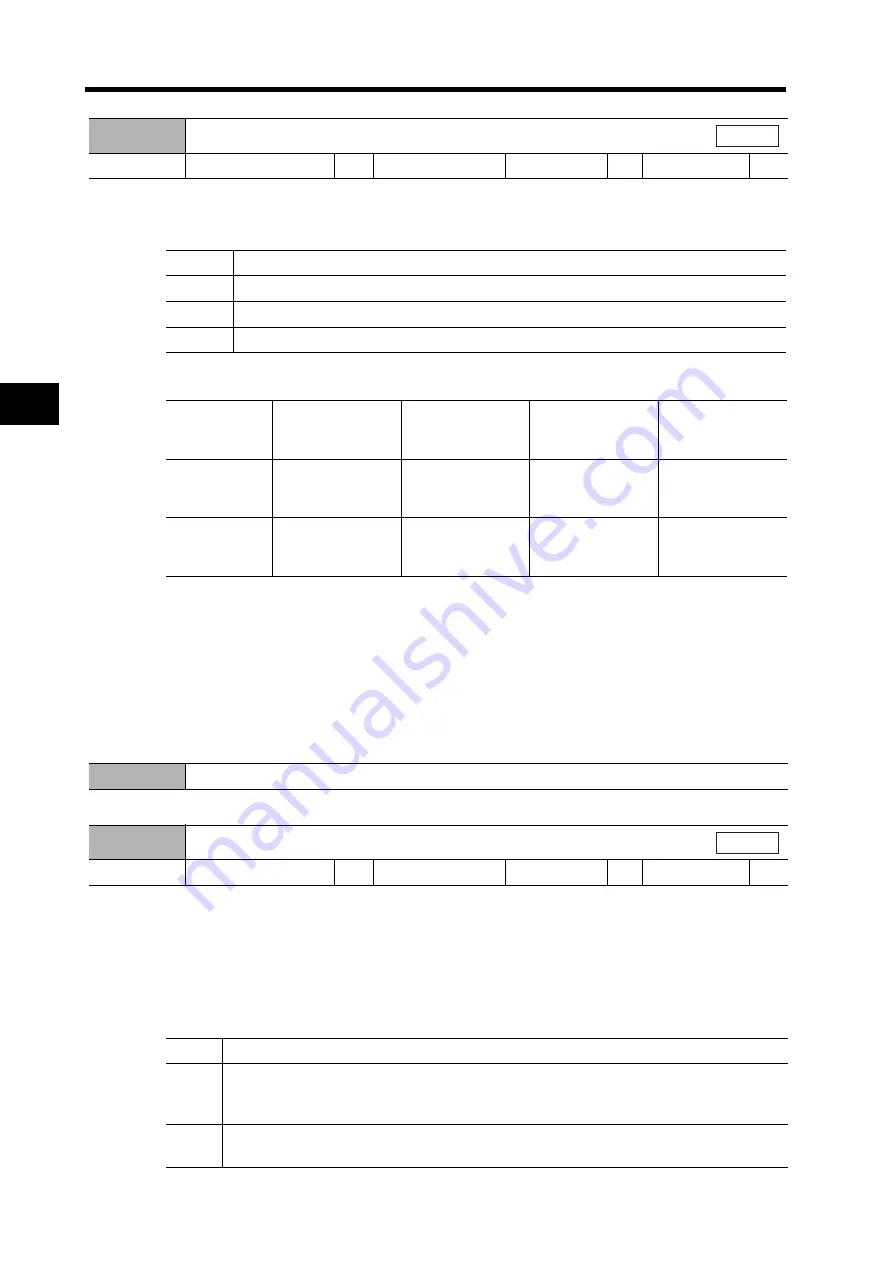
Differences between High-response Position Control and Advanced Position Control
The Notch Filter 1 Frequency, Vibration Frequency, and Realtime Autotuning Mode Selection
cannot be used at the same time in High-response Position Control Mode. The parameter entered
first will be given priority.
Example:
When the Realtime Autotuning Mode Selection is set, the Servo Drive will be forcibly set to 1500
(disabled), even if the Notch Filter 1 Frequency is input.
The adaptive filter is disabled in High-response Position Control Mode. To use the adaptive filter,
use the Advanced Position Control Mode.
Set whether to use the drive prohibit inputs.
You can prevent the Servomotor from rotating beyond the device’s operating range by connecting
limit inputs.
When only the Forward Drive Prohibit Input (POT) is turned ON, the Servomotor can operate in
the forward direction, but cannot operate in the reverse direction.
Explanation of Settings
Pn02
Control Mode Selection
Setting range
0 to 2
Unit
---
Default setting
2
Power OFF
→
ON
Yes
All modes
Setting
Explanation
0
High-response Position Control
1
Internally Set Speed Control
2
Advanced Position Control
Notch Filter 1
Frequency (Pn1D)
Vibration
Frequency (Pn2B)
Realtime Autotun-
ing Mode Selection
(Pn21)
Adaptive Filter
Table Number
Display(Pn2F)
High-response
Position
Control
Conditional
Conditional
Conditional
Disabled
Advanced
Position
Control
Enabled
Enabled
Enabled
Enabled
Pn03
Not used. (Do not change setting.)
Pn04
Drive Prohibit Input Selection
Setting range
0 or 1
Unit
---
Default setting
1
Power OFF
→
ON
Yes
All modes
Setting
Explanation
0
Drive prohibit inputs enabled.
When the Forward Drive Prohibit Input (POT) and the Reverse Drive Prohibit Input (NOT)
are ON, the Servomotor can operate in the forward and reverse directions.
1
Drive prohibit inputs disabled.
Operation is possible regardless of the POT and NOT inputs.







































































