





























4 - 20
4 POSITIONING DEDICATED SIGNALS
(c) When using the Q172DLX/built-in interface in Motion CPU, "Normally open
contact input" and "Normally closed contact input" of the system setting
can be selected.
When using the proximity dog input (DOG) of servo amplifier/bit device,
"Normally open contact input" and "Normally closed contact input" of the
servo data setting can be selected.
QDS
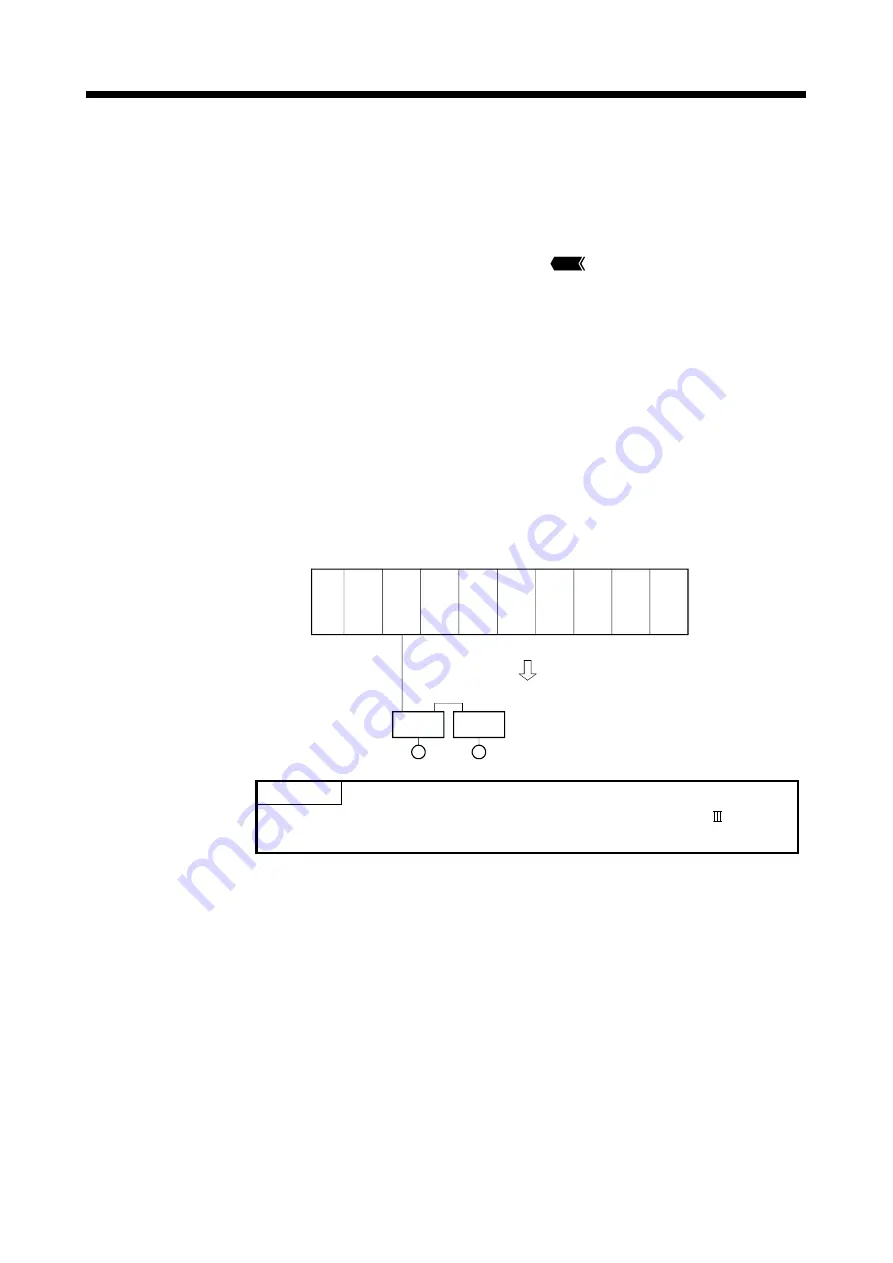
(11) Servo ready signal (M2415+20n) ............................... Status signal
(a) This signal turns on when the servo amplifiers connected to each axis are
in the READY state.
(b) This signal turns off in the following cases.
• M2042 is off
• Servo amplifier is not mounted
• Servo parameter is not set
• It is received the forced stop input from an external source
• Servo OFF by the servo OFF command (M3215+20n) ON
• Servo error occurs
Refer to "APPENDIX 1.5 Servo errors" for details.
Q61P Q03UD
CPU
Q38DB
Communication is normal
Servo ready signal : ON
M
Q172D
CPU
AMP
M
AMP
POINT
When the part of multiple servo amplifiers connected to the SSCNET (/H)
becomes a servo error, only an applicable axis becomes the servo OFF state.
(12) Torque limiting signal (M2416+20n) ........................... Status signal
This signal turns on while torque limit is executed.
The signal toward the torque limiting axis turns on.
Summary of Contents for Q Series
Page 1: ......
Page 19: ...A 18 MEMO ...
Page 129: ...4 90 4 POSITIONING DEDICATED SIGNALS MEMO ...
Page 134: ...5 5 5 MECHANICAL SYSTEM PROGRAM MEMO ...
Page 139: ...5 10 5 MECHANICAL SYSTEM PROGRAM MEMO ...
Page 163: ...6 24 6 DRIVE MODULE MEMO ...
Page 201: ...7 38 7 TRANSMISSION MODULE MEMO ...
Page 257: ...9 12 9 REAL MODE VIRTUAL MODE SWITCHING AND STOP RE START MEMO ...
Page 267: ...10 10 10 AUXILIARY AND APPLIED FUNCTIONS MEMO ...
Page 352: ......







































































