





























6-536
Interference avoidance function
5Functions set with parameters
5.24.5 Support of additional axes
If the robot uses additional axes, the interference avoidance function can be set to consider the movement
of the additional axis by setting the additional axis synchronous control parameter. (Only linear axis such as
locomotion axis.)
Refer to
and set the parameter according to the usage state.
Note) Set the traveling axis coordinate as “0” for the positional relation between robots, which are explained
in a later section,
"5.24.7Calibration between robots (Checking for interference between robots)"
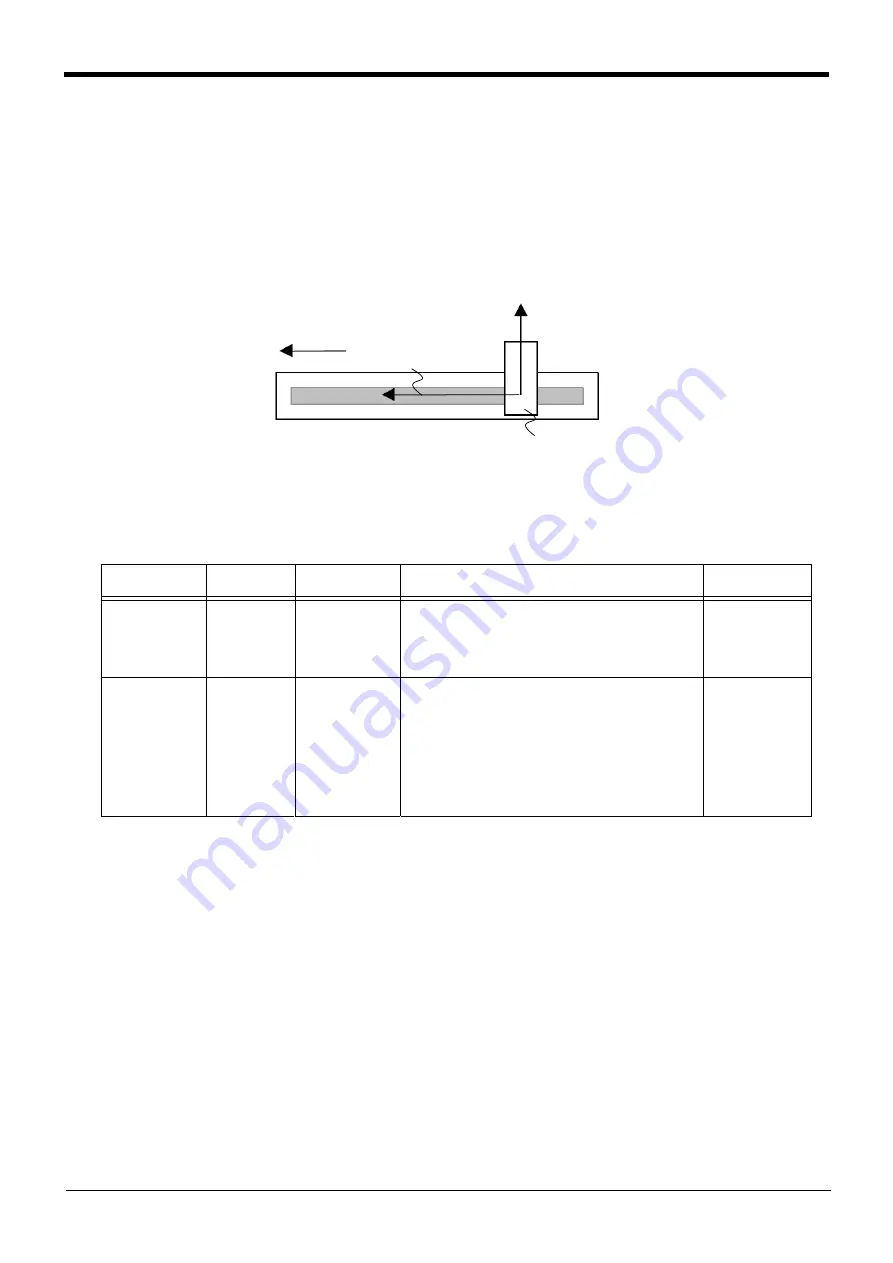
Fig.5-23:Example of using locomotion axis
Table 5-38:Additional axis synchronous control parameter
Parameter
Parameter
name
No. of arrays
No. of characters
Details explanation
Factory setting
Interference
avoidance addi-
tional axis (loco-
motion axis)
number
CAVAXJNO
Integer 1
Set up the axial number of the additional axis (locomotion axis)
made into the target of interference avoidance.
The interference check is not made other than 7 and 8 axes.
Setting value: 0, 7 or 8
0
Additional axis
Synchronization
direction
AXDIR
Real number 3
Convert the coordinate using the locomotion axis’ +
direction as the X axis to the coordinate of the robot
coordinate system.
1st element: Rotation angle around X axis
2nd element: Rotation angle around Y axis
3rd element: Rotation angle around Z axis
Note) As the default, the robot X axis matches the
locomotion axis’ + direction.
0.0, 0.0, 0.0
図
Locomotion axis + direction
In this case, parameter AXDIR is set to 0.0, 0.0, -90.0.
(-90 degree rotation around robot’s Z axis.)
Robot +X axis
Robot +Y axis
Locomotion axis
Robot arm





















































