





























4MELFA-BASIC V
MELFA-BASIC V functions
4-105
(6) Confirming that the target position is reached
The positioning finish conditions can be designated with as No. of pulses. (Fine instruction) This designation
is invalid when using continuous movement.
*Command word
*Statement example
*Program example
Program example
*Related functions
Command word
Explanation
Fine
Designates the positioning finish conditions with a No. of pulses. Specify a small number of pulses
to allow more accurate positioning.
Mov and Dly
After the Mov movement command, command the Dly instruction (timer) to complete positioning .
Statement example
Explanation
Fine100 ............................................................................
Sets the positioning finish conditions to 100 pulses.
Mov P1 .............................................................................
Moves with joint interpolation to P1. (The movement completes at the command value
level.)
Dly 0.1 ..............................................................................
Positioning after the movement instruction is performed by the timer.
Program
Explanation
1
Cnt 0
' The Fine instruction is valid only when the Cnt instruction is OFF.
2
Mvs P1
'
(1)
Moves with joint interpolation to P1.
3
Mvs P2, -50 *1)
'
(2)
Moves with joint interpolation from P2 to position retracted 50mm in hand direction.
4
Fine 50
' Sets positioning finish pulse to 50.
5
Mvs P2
'
(3)
Moves with linear interpolation to P2
(Mvs completes if the positioning complete pulse count is 50 or less.)
6
M_Out(17)=1
'
(4)
Turns output signal 17 ON when positioning finish pulse reaches 50 pulses.
7
Fine 1000
' Sets positioning finish pulse to 1000.
8
Mvs P3, -100 *1)
'
(5)
Moves linearly from P3 to position retracted 100mm in hand direction.
9
Mvs P3
'
(6)
Moves with linear interpolation to P3.
10
Dly 0.1
'
Performs the positioning by the timer.
11
M_Out(17)=0
'
(7)
Turns output signal 17 off.
12
Mvs , -100 *1)
'
(8)
Moves linearly from current position (P3) to position retracted 100mm in hand direction.
13
End
' Ends the program.
Function
Explanation page
Move with joint interpolation............................................................................
Page 100, "(3) Circular interpolation movement"
Move linearly. ..................................................................................................
Page 99, "(2) Linear interpolation movement"
Continuously move to next position without stopping at target position..........
Page 102, "(4) Continuous movement"
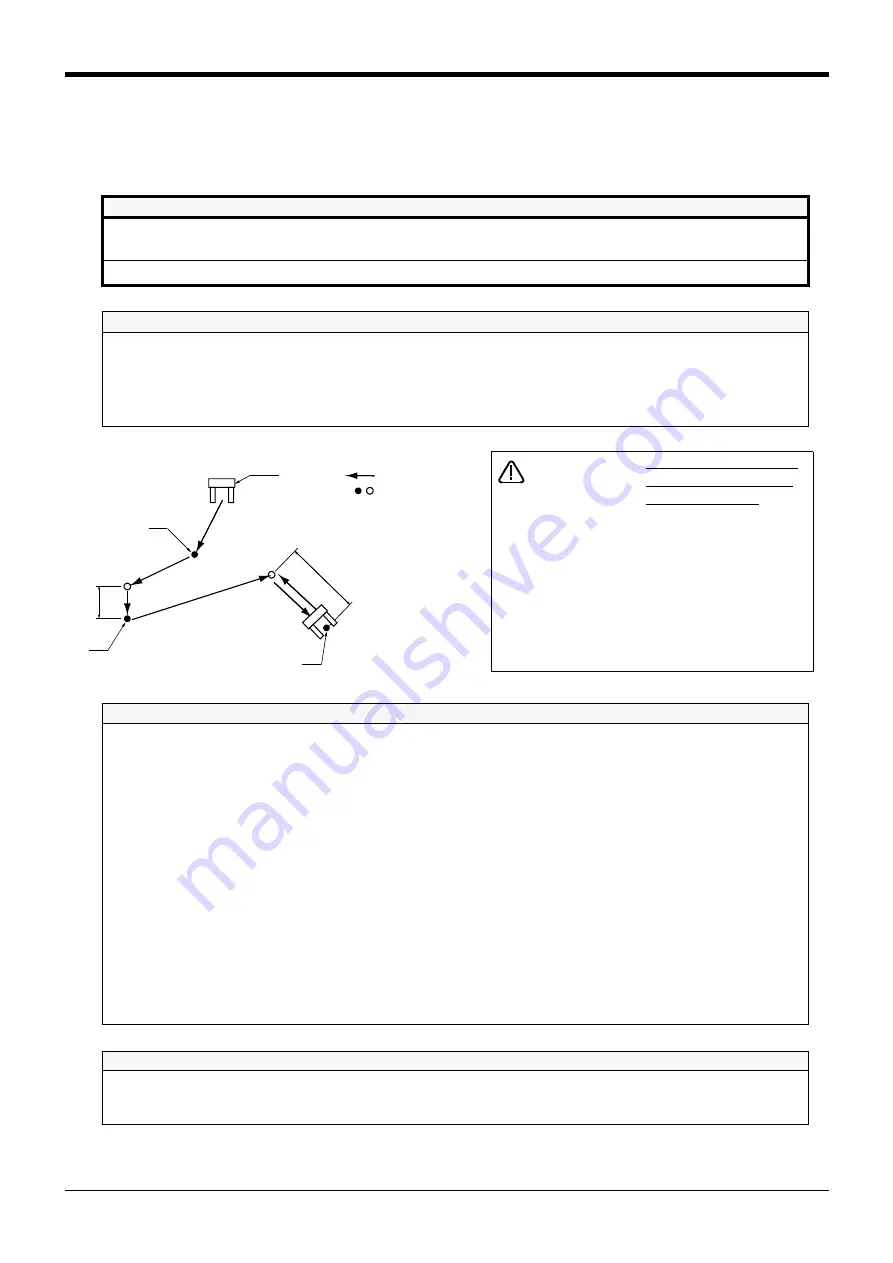
(1)
(2)
(5)
P1
(3)
(6)
(8)
50
m
m
10
0m
m
P2
Hand
:Movement position
:Robot movement
P3
(7) Turns output signal bit 17
OFF at finish of positioning to P3.
(4) Turns output signal bit 17 ON
at finish of positioning to P2.
*1) Specification of for-
ward/backward move-
ment of the hand
The statement examples and program exam-
ples are for a vertical 6-axis robot.The hand
advance/retrace direction relies on the Z axis
direction (+/- direction) of the tool coordinate
set for each model.
Refer to the tool coordinate system shown in
"Confirmation of movement" in the separate
"From Robot unit setup to maintenance", and
designate the correct direction.
CAUTION
Robot movement





















































