





























Maintenance 8. Arm #4
LS20 Rev.4
119
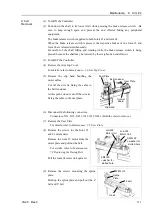
(6) Mount the Arm Top Cover.
For details, refer to
Maintenance: 3.1 Arm Top Cover
.
(7) Check if the Joint #4 moves in a Jog motion by operating from EPSON RC+ menu -
[Tools]-[Robot Manager]-[Jog & Teach].
If the Manipulator oscillates with MotorON and the following errors are detected,
Error 5041: Motor torque output failure in low power state.
Error 4241: Over speed during low power mode was detected.
or when the joint other than Joint #4 moves, the connector for other joint might be
connected to the Joint #4 motor. Check the connector connection.
(8) Execute the calibration of Joint #4.
For details on the calibration method, refer to
Maintenance: 13. Calibration
.
Summary of Contents for LS20
Page 1: ...Rev 4 EM179R3533F SCARA ROBOT LS20 series MANIPULATOR MANUAL ...
Page 2: ...MANIPULATOR MANUAL LS20 series Rev 4 ...
Page 8: ...vi LS20 Rev 4 ...
Page 12: ...TABLE OF CONTENTS x LS20 Rev 4 ...
Page 14: ......
Page 29: ...Setup Operation 2 Specifications LS20 Rev 4 17 LS20 804S Standard Model ...
Page 31: ...Setup Operation 2 Specifications LS20 Rev 4 19 LS20 804C Cleanroom Model ...
Page 33: ...Setup Operation 2 Specifications LS20 Rev 4 21 LS20 A04S Standard Model ...
Page 35: ...Setup Operation 2 Specifications LS20 Rev 4 23 LS20 A04C Cleanroom Model ...
Page 72: ......
Page 92: ...Maintenance 4 Cable 80 LS20 Rev 4 4 2 Wiring Diagrams 4 2 1 Signal Cable ...
Page 176: ...Maintenance 14 Maintenance Parts List 164 LS20 Rev 4 ...