





























C h a p t e r 7 M o t i o n C o n t r o l B a s i c S e t t i n g s & O p e r a t i o n
7 - 1 6 5
7_
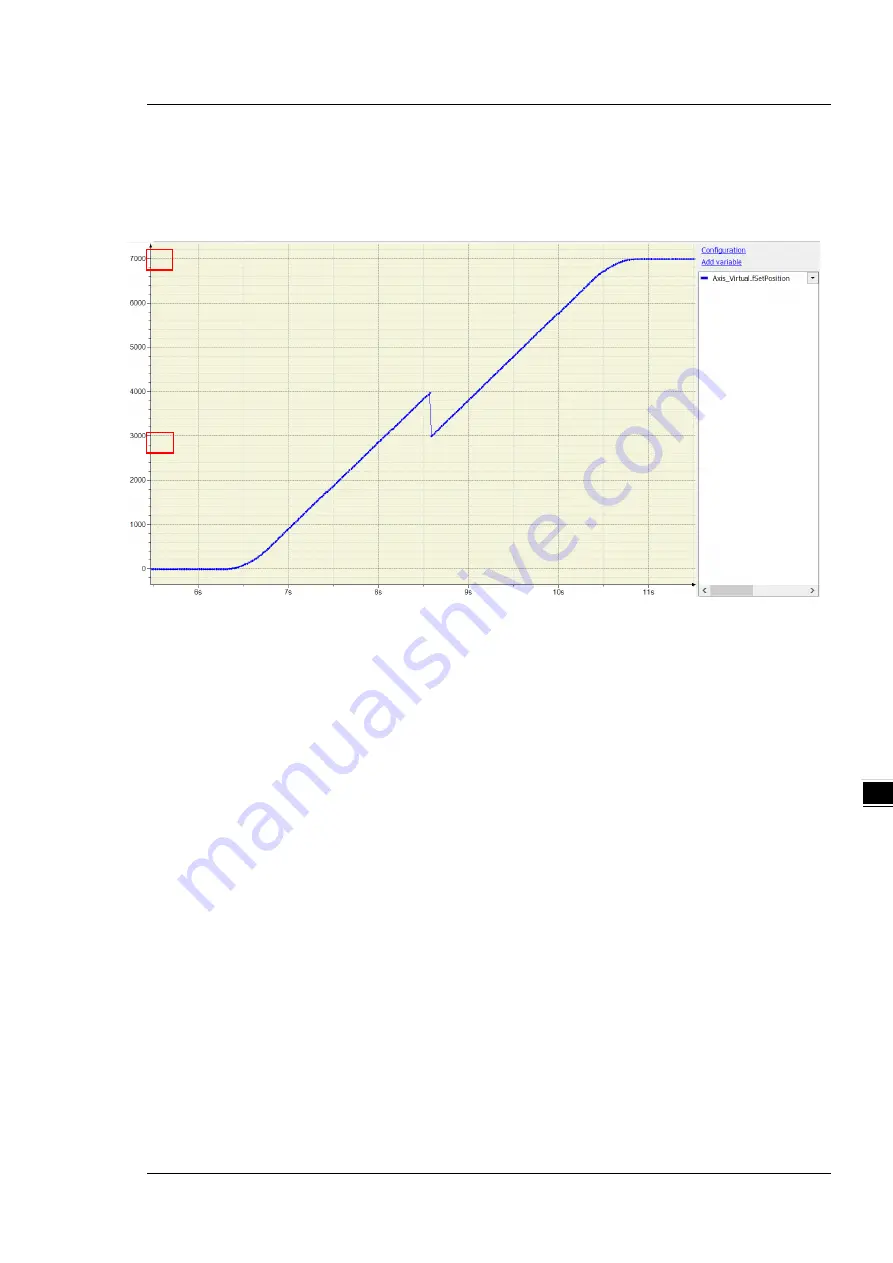
The difference between the above and the picture below is that the mode of MC_SetPoition is changed to Absolute
(Position = 3000). The actual position is set to the parameterized absolute target Position value, and the position
would finally reach 7000 (7000 = 3000+(8000 – 4000)) without influencing the displacement of motion body
controlled by MC_MoveRelative. The displacement would be 8000 (8000=(4000 – 0)+(7000 – 3000))same as the
original setting.
ST language
Set StartFlag to be TRUE, then the normal operation of communication for axis would be checked.
IF StartFlag = TRUE THEN
IF Axis_Virtual.bCommunication = TRUE THEN
MC_Power0_Enable := TRUE;
MC_Power0_RegulatorOn := TRUE;
MC_Power0_DriveStart := TRUE;
END_IF
END_IF
// Under normal condition, set the axis to be in state Servo On.
MC_Power_0(
Axis:= Axis_Virtual,
Enable:= MC_Power0_Enable,
bRegulatorOn:= MC_Power0_RegulatorOn,
bDriveStart:= MC_Power0_DriveStart,
Status=> MC_Power0_Status,
bRegulatorRealState=> ,
bDriveStartRealState=> ,
Busy=> ,
Error=> ,
ErrorID=> );
Summary of Contents for AX-3 Series
Page 17: ...AX 3 Series Operation Manual 1 10 _1 MEMO...
Page 54: ...AX 3 Series Operation Manual 3 22 _3 MEMO...
Page 98: ...AX 3 Series Operation Manual 4 44 _4 MEMO...
Page 118: ...AX 3 Series Operation Manual 6 8 _6 MEMO...
Page 310: ...AX 3 Series Operation Manual 8 18 8_ MEMO...
Page 355: ...Appendix A Troubleshooting A 5 _A...





















































