























EM11 User’s Manual
Appendix II
163
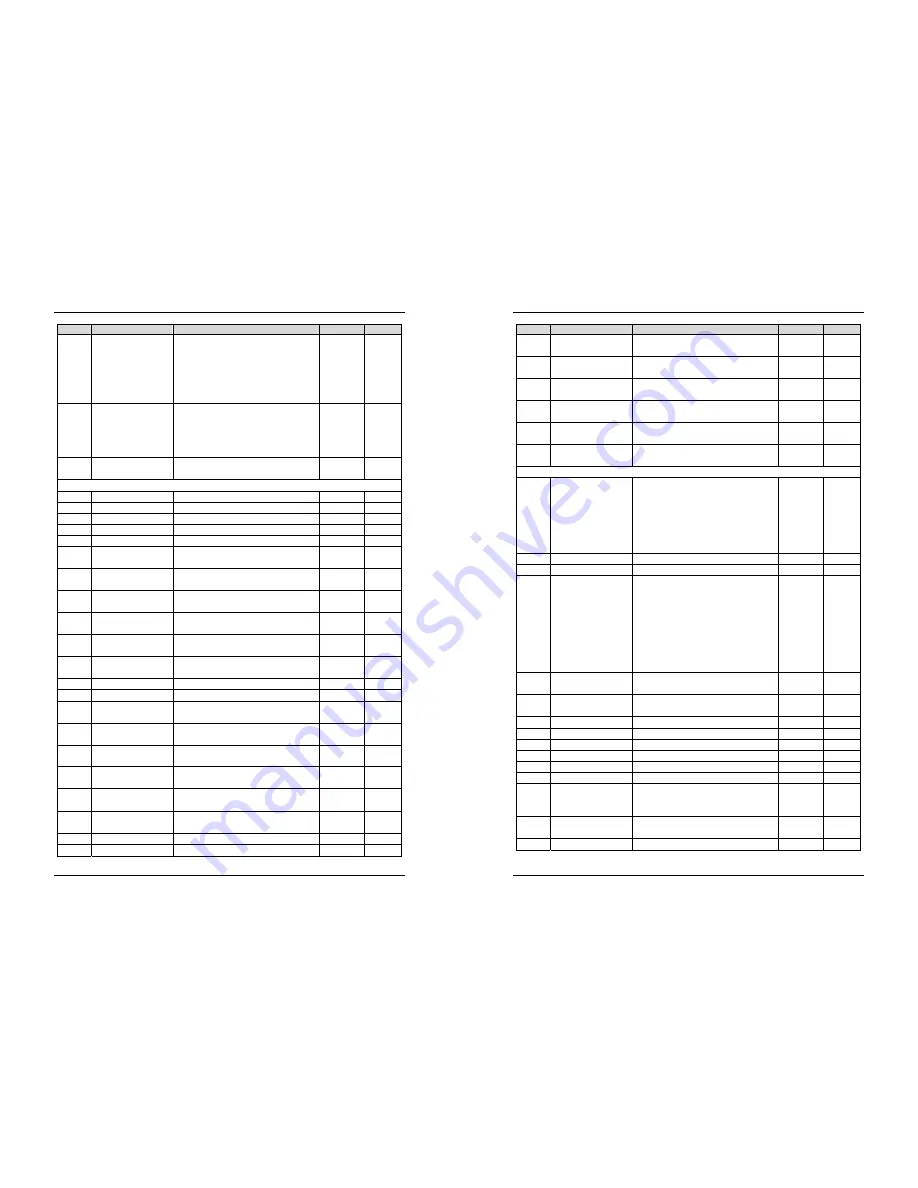
Code
Parameter Name
Setting range
Default
Property
bb-35
Fault protection action
selection 4
Unit's digit: Speed deviation too large, Err42
Same as unit's digit in bb-32
Ten's digit: Motor over-speed, Err43.
Same as unit's digit in bb-32
Hundred's digit: Initial position fault, Err51.
Same as unit's digit in bb-32
00000
☆
bb-36
Frequency selection for
continuing to run of
fault
0: Current running frequency
1: Set frequency
2: Frequency upper limit
3: Frequency lower limit
4: Backup frequency of abnormality (bb-37)
0
☆
bb-37
Backup frequency of
abnormality
0.0%~100.0% (maximum frequency)
1.0%
☆
Group bC: Fault diagnosis
bC-00 1st
fault
type
–
–
●
bC-01 2nd
fault
type
–
–
●
bC-02
3rd fault type (latest) –
–
●
bC-03 Frequency of latest fault –
–
●
bC-04
Current of latest fault –
–
●
bC-05
DC Bus voltage of latest
fault
– –
●
bC-06
Input terminals status of
latest fault
– –
●
bC-07
Output terminal status
of latest fault
– –
●
bC-08
Frequency inverter
status of latest fault
– –
●
bC-09
Power-on time of latest
fault
– –
●
bC-10
Running time of latest
fault
– –
●
bC-11
Frequency of 2nd fault –
–
●
bC-12
Current of 2nd fault –
–
●
bC-13
DC Bus voltage of 2nd
fault
– –
●
bC-14
Input terminal status of
2nd fault
– –
●
bC-15
Output terminal status
of 2nd fault
– –
●
bC-16
Frequency inverter
status of 2nd fault
– –
●
bC-17
Power-on time of 2nd
fault
– –
●
bC-18
Running time of 2nd
fault
– –
●
bC-19
Frequency of 1st fault –
–
●
bC-20
Current of 1st fault
–
–
●
Appendix II
EM11 User’s Manual
164
Code
Parameter Name
Setting range
Default
Property
bC-21
DC Bus voltage of 1st
fault
– –
●
bC-22
Input terminal status of
1st fault
– –
●
bC-23
Output terminal status
of 1st fault
– –
●
bC-24
Frequency inverter
status of 1st fault
– –
bC-25
Power-on time of 1st
fault
– –
●
bC-26
Running time of 1st
fault
– –
●
Group C0: PID Control Function
C0-00
PID setting source
0: C0-01
1: AI1
2: AI2
3: AI3
4: Pulse setting (DI6)
5: Communication setting
6: Multi-function
0
☆
C0-01
PID digital setting
0.0%~100.0%
50.0%
☆
C0-02
PID setting change time 0.00s~650.00s
0.00s
☆
C0-03
PID feedback source
0: AI1
1: AI2
2: AI3
3: Pulse setting (HDI)
4: AI1 – AI2
5: AI1 + AI2
6: MAX (|AI1|, |AI2|)
7: MIN (|AI1|, |AI2|)
8: Communication setting
0
☆
C0-04
PID action direction
0: Forward action
1: Reverse action
0
☆
C0-05
PID setting feedback
range
0~65535 1000
☆
C0-06
Proportional gain KP1 0.00~10.0
20.0
☆
C0-07
Integral time TI1
0.01s~10.00s
2.00s
☆
C0-08
Differential time TD1 0.000s~10.000s
0.000s
☆
C0-09
Proportional gain KP2 0.00~10.00
20.0
☆
C0-10
Integral time TI2
0.01s~10.00s
2.00s
☆
C0-11
Differential time TD2 0.00s~10.00s
0.000s
☆
C0-12
PID parameter
switchover condition
0: No switchover
1: Switchover via DI
2: Automatic switchover based on deviation
0
☆
C0-13
PID parameter
switchover deviation 1
0.0% ~ C0-14
20.0%
☆
C0-14
PID parameter
C0-13 ~ 100.0%
80.0%
☆







































































