





























EM11 User’s Manual
5. Description of Function Codes
53
It is used to set the accumulative running time threshold of the Frequency inverter. If the accumulative
running time (b9-09) reaches the value set in this parameter, the corresponding DO terminal becomes ON.
Code
Parameter Name
Setting Range
Default
b2-22
Action after running time
reached
0: Continue to run
1: Stop
0
This function is used to define the action after b2-21 preset time reached. Setting 0 inverter will continue
work after present running time reached; and set 1, the inverter will stop.
Code
Parameter Name
Setting Range
Default
b2-23 Cooling
fan
control
0: Fan working during running
1: Fan working during power on
0
It is used to set the working mode of the cooling fan. If this parameter is set to 0, the fan works when the
frequency inverter is in running state. When the frequency inverter stops, the cooling fan works if the
heatsink temperature is higher than 40°C, and stops working if the heatsink temperature is lower than 40°C.
If this parameter is set to 1, the cooling fan keeps working after power-on.
Code
Parameter Name
Setting Range
Default
b2-24
Dormant frequency
0.00Hz ~wakeup frequency (b2-26)
0.00 Hz
b2-25
Dormant delay time
0.0s~6000.0s
0.0s
b2-26 Wakeup
frequency
Dormant frequency (b2-24)~ maximum
frequency (b0-13)
0.00 Hz
b2-27
Wakeup delay time
0.0s~6000.0s
0.0s
These parameters are used to implement the dormant and wakeup functions in the water supply application.
When the frequency inverter is in running state, the frequency inverter enters the dormant state and stops
automatically after the dormant delay time (b2-25) if the set frequency is lower than or equal to the dormant
frequency (b2-24).
When the frequency inverter is in dormant state and the present running command is effective, the frequency
inverters starts up after the wakeup delay time (b2-27) if the set frequency is higher than or equal to the
wakeup frequency (b2-26).
Generally, set the wakeup frequency should be equal to or higher than the dormant frequency. If the wakeup
frequency and dormant frequency are set to 0, the dormant and wakeup functions are disabled.
When the dormant function is enabled, if the frequency source is PID, whether PID operation is performed
in the dormant state is determined by C0-27. In this case, select PID operation enabled in the stop state
(C0-27 = 1).
Code
Parameter Name
Setting Range
Default
b2-28 Timing
function
0: Disabled
1: Enabled
0
b2-29
Timing duration source
0: b2-30
1: AI1
2: AI2
3: AI3
(100% of analog input corresponds
to the value of b2-30)
0
b2-30
Timing duration
0.0min~6500.0 min
0.0 min
These parameters are used to implement the frequency inverter timing function.
If b2-28 is set to 1, the frequency inverter starts to time at startup. When the set timing duration reached, the
frequency inverter stops automatically, and meanwhile the corresponding DO outputs ON signal.
The frequency inverter starts timing from 0.0min each time it starts up and the remaining timing duration can
be checked by U0-20.
The timing duration is set in b2-29 and b2-30, in unit of minute.
5. Description of Function Codes
EM11 User’s Manual
54
Code
Parameter Name
Setting Range
Default
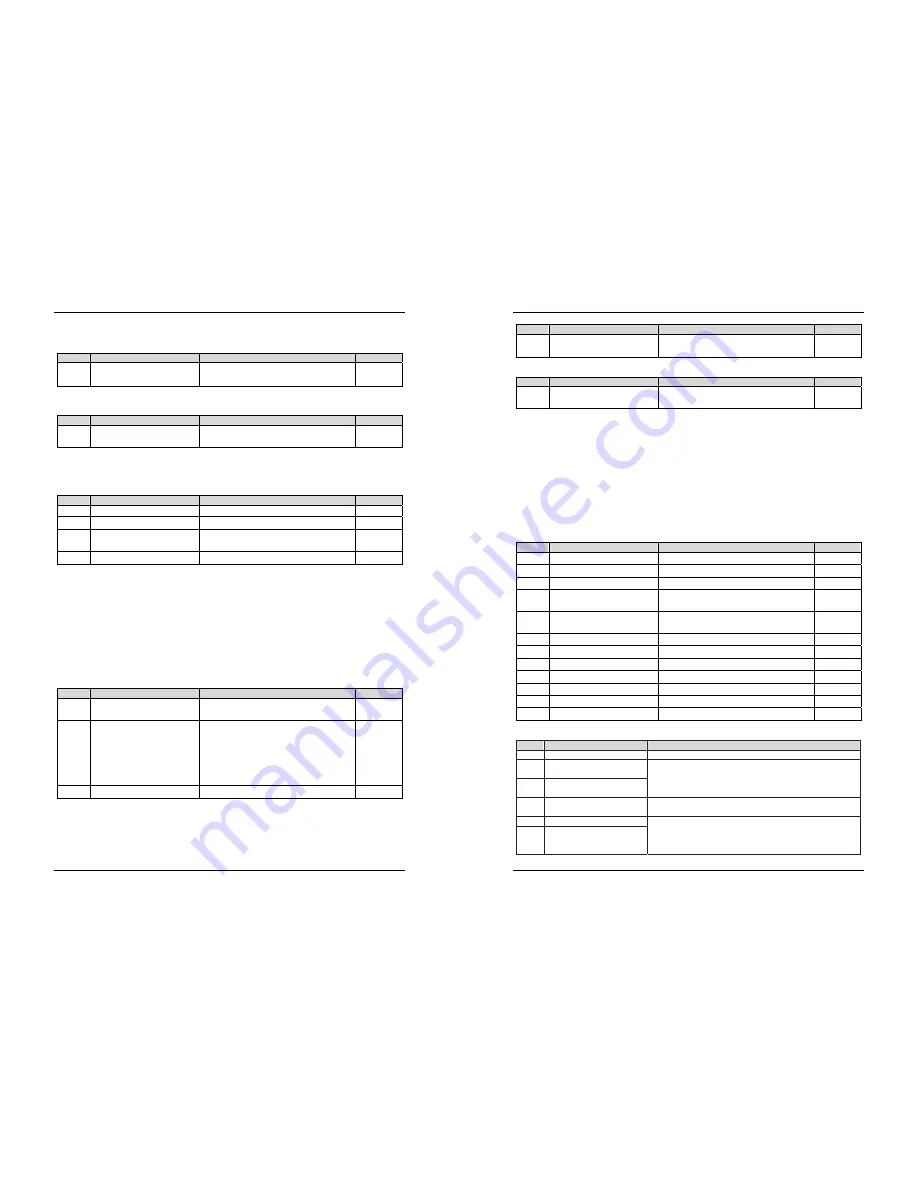
b2-31
This time running time
reached threshold
0.0min~6500.0 min
0.0 min
If the present running time reaches the value set in this parameter, the corresponding DO outputs ON signal,
indicating that present running time is reached.
Code
Parameter Name
Setting Range
Default
b2-32 Startup
protection
0: No
1: Yes
0
This parameter is used to enable the frequency inverter safety protection. If it is set to 1, the frequency
inverter does not respond to the run command after power-on (for example, an input terminal is ON before
power-on). The frequency inverter responds only after the run command is cancelled and becomes valid
again.
In addition, the frequency inverter does not respond to the run command valid from fault reset of the
frequency inverter. The run protection can be disabled only after the run command is cancelled one time.
In this way, the motor will not automatically startup to avoid unexpected dangerous conditions for these
startup commands from power-on and fault reset.
5.4 Group b3: Input Terminals
The EM11 provides six digital input (DI) terminals (DI6 can be used for high-speed pulse input) and two
analog input (AI) terminals. The optional extension card provides another six DI terminals (DI7 to DI12) and
one AI terminal (AI3).
Code
Parameter Name
Setting Range
Default
b3-00
DI1 function selection
1: Forward RUN (FWD)
Standard
b3-01
DI2 function selection
4: Forward JOG (FJOG)
Standard
b3-02
DI3 function selection
9: Multi-function terminal 4
Standard
b3-03
DI4 function selection
12: clear to zero of UP and DOWN setting
(terminal, keypad)
Standard
b3-04
DI5 function selection
13: Terminal 1 for acceleration/ deceleration
time selection
Standard
b3-05
DI6/HDI function selection
32: Pulse input (enabled only for HDI)
Standard
b3-06
DI7 function selection
0
Extended
b3-07
DI8 function selection
0
Extended
b3-08
DI9 function selection
0
Extended
b3-09
DI10 function selection
0
Extended
b3-10
DI11 function selection
0
Extended
b3-11
DI12 function selection
0
Extended
The following table lists the functions available for the DI terminals.
Table 6-1 Functions of DI terminals
Value
Function
Description
0
No function
Set 0 for reserved terminals to avoid malfunction.
1
Forward RUN (FWD) or
running command
The terminal is used to control forward or reverse running of the
frequency inverter.
2
Reverse RUN (REV) or the
direction of FED/REV
3 Three-line
control
The terminal determines three-line control of the frequency
inverter. For details, see the description of b3-13.
4
Forward JOG (FJOG)
FJOG indicates forward JOG running, while RJOG indicates
reverse JOG running. The JOG frequency, acceleration time and
deceleration time are described respectively in b2-00, b2-01 and
b2-02.
5 Reverse
JOG
(RJOG)







































































