





























Overview
16
• give control commands to the drive (Start, Stop, Run enable,
etc.)
• feed a motor speed or torque reference to the drive
• give a process actual value or a process reference to the PID
controller of the drive
• read status information and actual values from the drive
• reset a drive fault.
The EtherCAT® commands and services supported by the RECA-
01 EtherCAT® Adapter module are discussed in the chapter
Communication
on
page 47
. Please refer to the user
documentation of the drive as to which commands are supported
by the drive.
The adapter module is mounted into an option slot on the motor
control board if the drive. See the drive manuals for module
placement options.
The module is classified as a full EtherCAT® slave.
Device Description files for ABB Drives are available through your
local ABB representative and the ABB Library (www.abb.com).
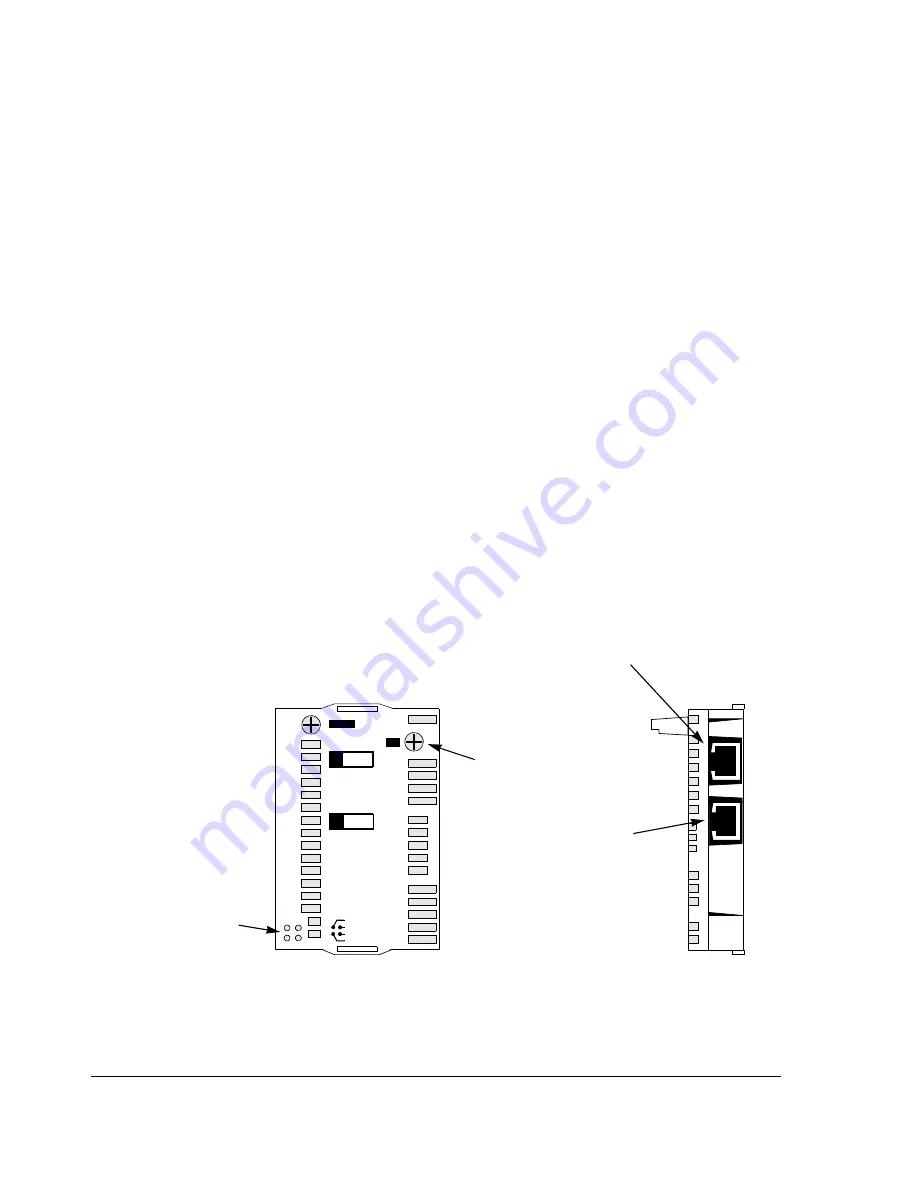
Figure 1. The RECA-01 Adapter module.
Ethernet connector X1
(see chapter
Electrical installation
)
Diagnostic LEDs
(see chapter
Diagnostics
)
Fixing screw
(GND)
(frame)
Top view
Side view
RECA-01
ETHERCAT ADAPTER
CHASSIS
X1
X2
NETWORK
LINK / ACTIVITY 2
LINK / ACTIVITY 1
ETHERCAT RUN
ETHERCAT ERROR
GND
Ethernet
connector X2
OUT
NETWORK
IN
Summary of Contents for RECA-01
Page 1: ...ABB Drives User s Manual EtherCAT Adapter Module RECA 01 ...
Page 4: ......
Page 6: ...Safety instructions 6 ...
Page 24: ...Quick start up guide 24 ...
Page 26: ...Mechanical installation 26 ...
Page 28: ...Electrical installation 28 ...
Page 32: ...Master configuration 32 ...
Page 56: ...Communication 56 ...
Page 72: ...CoE object dictionary 72 ...
Page 80: ...CoE Error codes 80 ...







































































