





























Individual Functions
6-
141
Increasing the Speed Reference Response (Feed Forward Control)
(SPEC: E or Later Only)
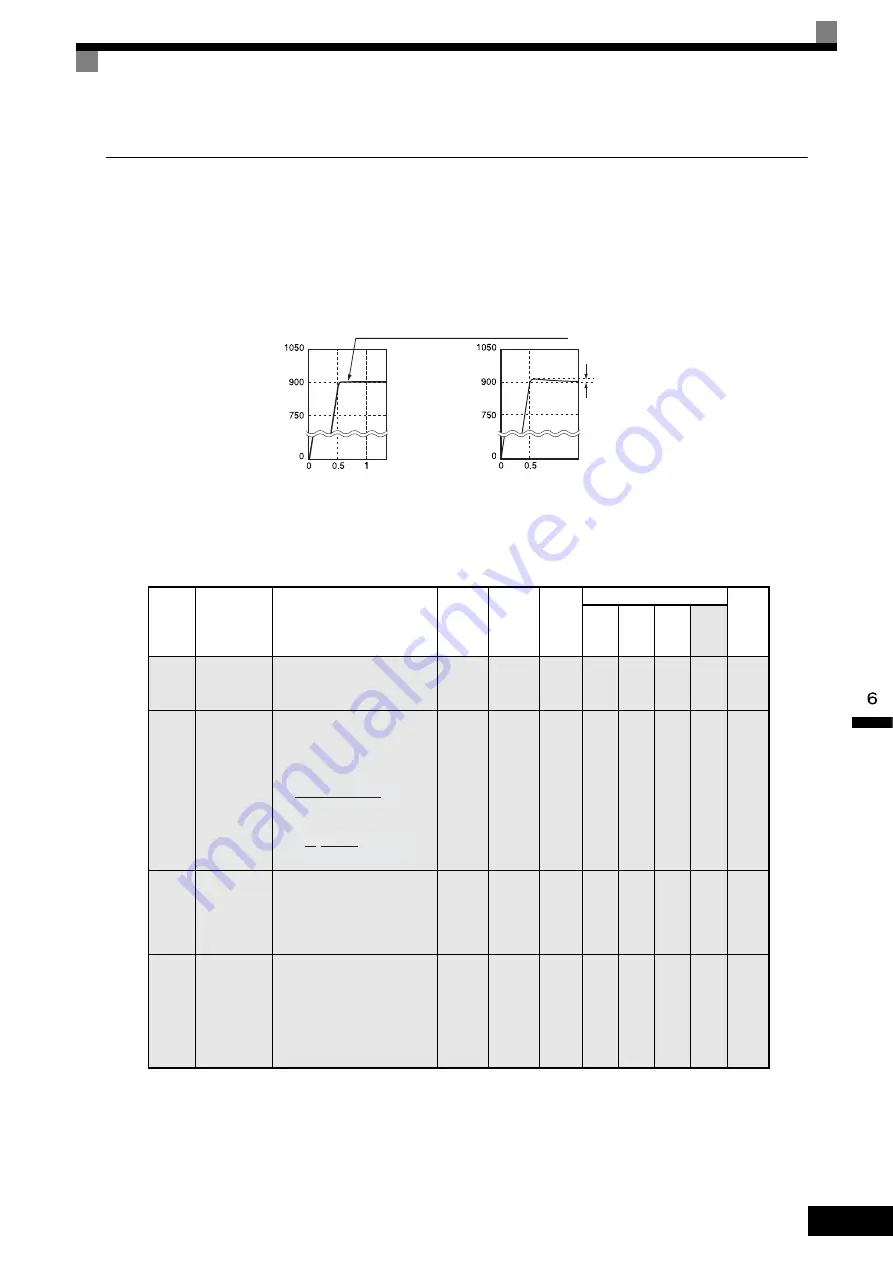
Use feed forward control to increase the responsiveness to speed references. This function is effective for
machines for which the ASR gain cannot be increased to a large value because doing so would result in vibra-
tions. There is also the additional effect of making the system less prone to overshoot.
This function is valid only in flux vector control.
Related Constants
* The factory setting depends on the Inverter capacity. The value for a 200 V Class Inverter for 0.4 kW is given.
Con-
stant
Number
Name
Description
Setting
Range
Factory
Setting
Change
during
Opera-
tion
Control Methods
MEMO
BUS
Regis-
ter
V/f
V/f
with
PG
Open
Loop
Vec-
tor
Flux
Vec-
tor
N5-01
Feed forward
control selec-
tion
Select the feed forward control.
0: Disabled
1: Enabled
0 or 1
0
No
No
No
No
A
5B0H
N5-02
Motor accel-
eration time
Set the time required to acceler-
ate the motor at the rated torque
(T
100
) to the rated speed (Nr).
J: GD
2
/4, P: Motor rated output
However,
0.001 to
10.000
0.178 s
*
No
No
No
No
A
5B1H
N5-03
Feed forward
proportional
gain
Set the proportional gain for
feed forward control.
Speed reference response will
increase as the setting of N5-03
is increased.
0.00 to
100.00
1.0
No
No
No
No
A
5B2H
N5-04
Response fre-
quency for
speed com-
mand
Sets the response frequency to a
speed command in units of 0.01
Hz.
Used when the machine rigidity
is high and the N5-03 is cor-
rectly adjusted.
Usually, setting is not required.
0.00 to
50.00
40.00
No
No
No
No
A
5B3H
Overshooting
Rotation
speed
(min
-1
)
Time(s)
Conventional speed control
Rotation
speed
(min
-1
)
Overshooting when acceleration completed
is being suppressed
Time(s)
Feed forward control
Overshooting control effect
2
π
x
J [kgm2]
x
Nr [min-1]
ta =
60
x
T100 [N
x
m]
[s]
T100 =
×
103 [N
x
m]
60
2
x
P [kW]
Nr [min-1]







































































