





























6 DSP301 and DSP402 Specifications
YASKAWA ELECTRIC
SIEP C730600 64A 1000-Series Option SI-ES3 Technical Manual
21
Statusword Operation Mode Specific Bits in Velocity Mode
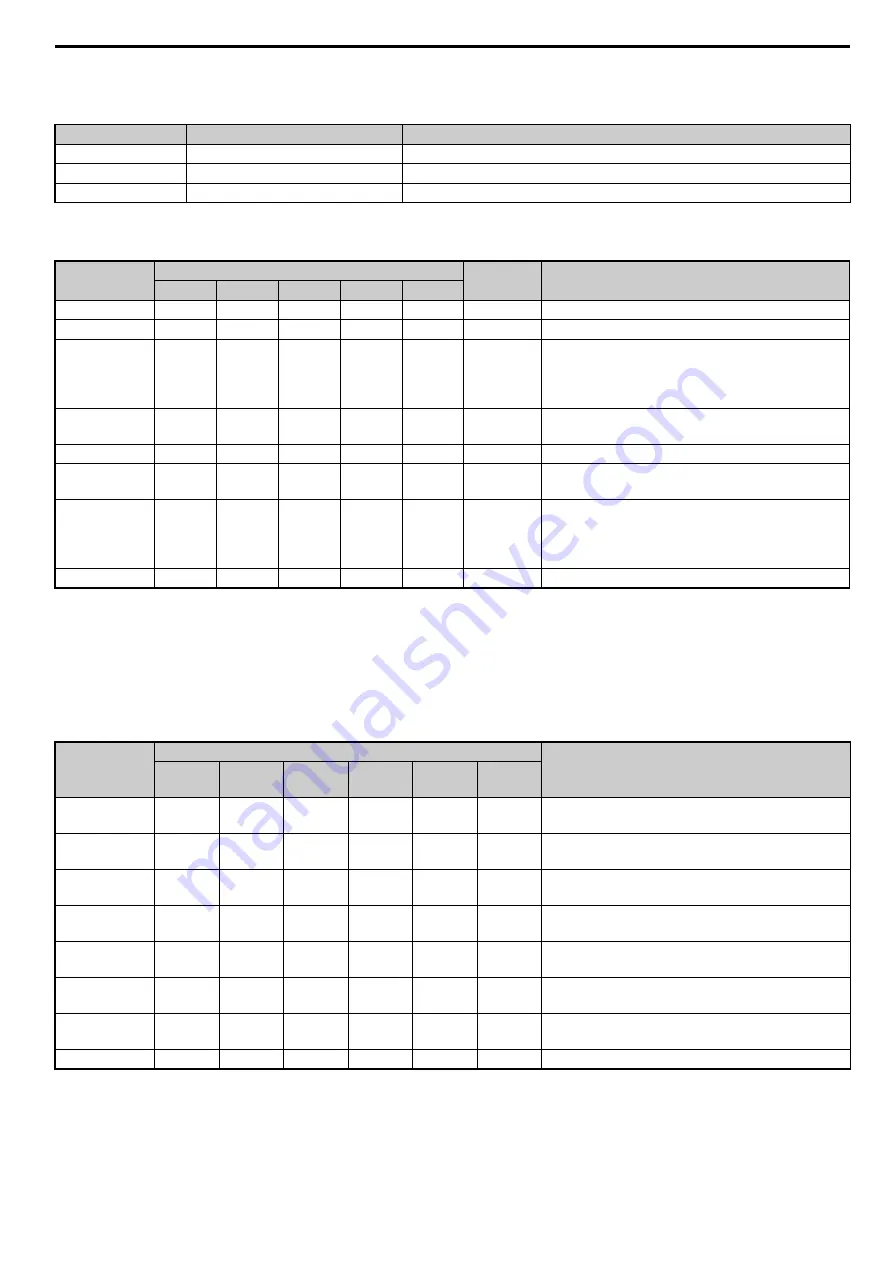
Table 9 Statusword Operation Mode Specific Bits in Velocity Mode
CANopen DSP402 Controlword State Transition Bits
Table 10 Controlword State Transitions
CANopen DSP402 Statusword State Transition Bits
After a change in the Controlword (remote control) according to
Table 10
, the node state will change and the state result
will be indicated in the Statusword according to
Table 11
.
Table 11 Statusword State Transitions
CANopen DS402 State Transition Definition
The Yaskawa EtherCAT option has the state transitions and states shown in
Figure 13
. The option must be in the
Operation Enable state in order to accept frequency and operation commands. In
Table 12
, the events needed to change
between different states are described. Some events are internally triggered, but most of the events are triggered from the
Controlword received from the bus.
Bit Number
Statusword
Drive Reference
10
Target reached
1: Speed agree
12
Reserved
0: Always, not applicable in velocity mode
13
Reserved
0: Always, not applicable in velocity mode
DSP402
Command
Controlword Bits
Transitions
<1>
Drive Command Orders
Bit 7
Bit 3
Bit 2
Bit 1
Bit 0
0: Shutdown
<1> Refer to
Figure 13
.
<2> Automatic transition to Enable operation state after executing SWITCHED ON state functionality.
<3> If the option does not have the NetCtrl command, it will not process any command orders against the drive.
0
0 or 1
1
1
0
2, 6, 8
Turns off run command
1: Switch on
0
0
1
1
1
3
Turns off run command
2: Switch on +
enable operation
0
1
1
1
1
3 + 4
<2> <3>
If velocity mode index 0x6042 (vl target velocity) < 0
: runs in reverse
If velocity mode index 0x6042 (vl target velocity)
≥
0
: runs forward
3: Disable
voltage
0
0 or 1
0 or 1
0
0 or 1
7, 9, 10, 12
Turns off run command
4: Quick stop
0
0 or 1
0
1
0 or 1
7, 10, 11
Quick stop (using time set in C1-09)
5: Disable
operation
0
0
1
1
1
5
Turns off run command
6: Enable
operation
0
1
1
1
1
4, 16
If velocity mode index 0x6042 (vl target velocity) < 0
: runs in reverse
If velocity mode index 0x6042 (vl target velocity)
≥
0
: runs forward
7: Fault reset
0
→
1
0 or 1
0 or 1
0 or 1
0 or 1
15
Resets fault
DSP402 State
Statusword Bits
Drive Option Cmd Evaluation
Bit 6
SOD
Bit 5
QS
Bit 3
F
Bit 2
OE
Bit 1
SO
Bit 0
RTSO
1: Not ready to
switch on
0
0 or 1
0
0
0
0
Drive is not ready
2: Switch on
disabled
1
0 or 1
0
0
0
0
Drive is stopped
3: Ready to
switch on
0
1
0
0
0
1
Drive is stopped
Ready to switch on
4: Switched on
0
1
0
0
1
1
Drive is stopped
Switched on
5: Operation
enabled
0
1
0
1
1
1
Drive is running
6: Quick stop
active
0
0
0
1
1
1
Drive is stopped
Quick stop
7: Fault reaction
active
0
0 or 1
1
1
1
1
Drive is running and fatal fault occurred
8: Fault
0
0 or 1
1
0
0
0
Drive is stopped and fatal fault occurred
Содержание SI-ES3
Страница 1: ......