8.1 Autotuning
8-5
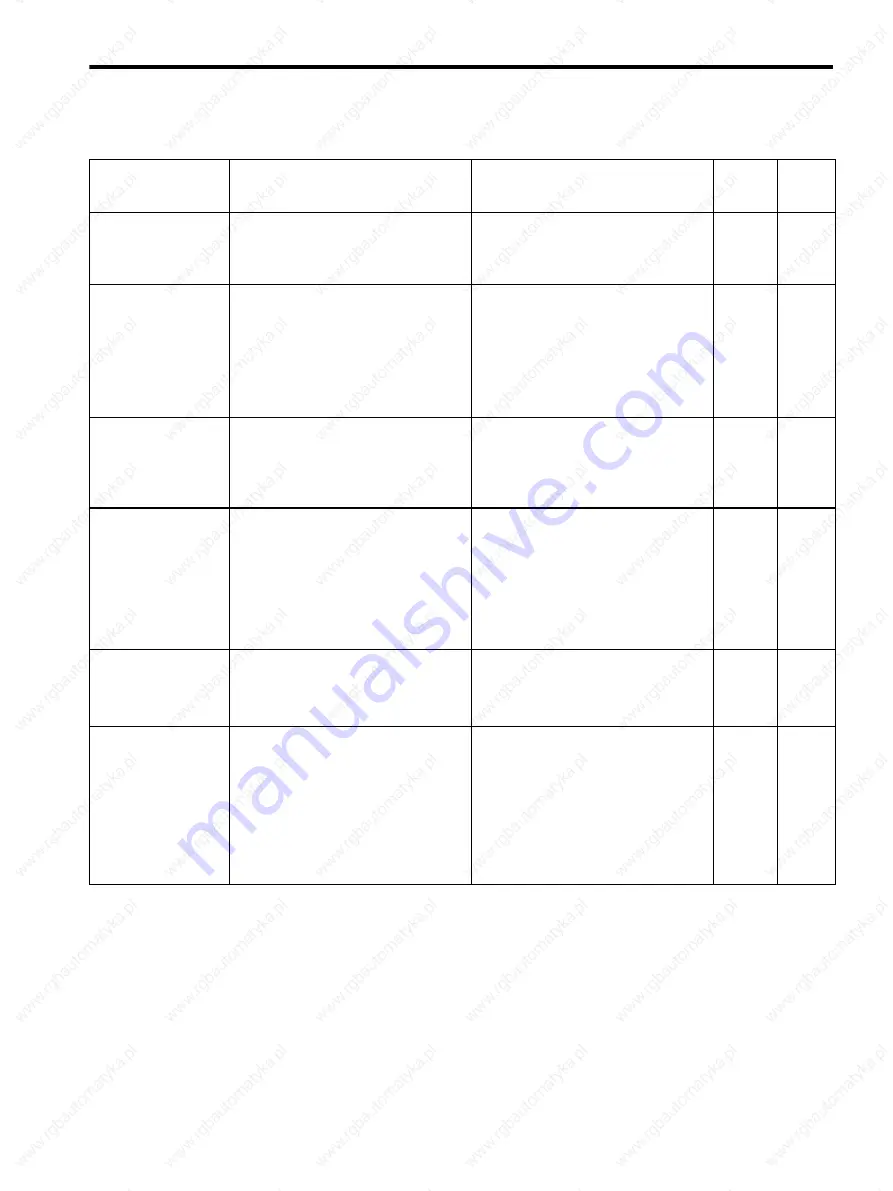
(2) Positioning Time Reduction Functions
Function Name and
Related Parameters
Description
Features
Valid
Control
Modes
Refer-
ence
Section
Feed-forward
Pn109
Pn10A
Feed-forward compensation for the
position reference is added to the speed
reference.
Adjustment is easy.
The system will be unstable if a large
value is set, possibly resulting in
overshooting or vibration.
Position
8.6.1
Mode Switch
(P/PI Switching)
Pn10B
Pn10C
Pn10D
Pn10E
Pn10F
Switches from PI control to P control
using the value of an internal servo
variable in a parameter (torque, speed,
acceleration, or position error) as a
threshold value.
Automatic switching between PI and P
control is easily set.
Position
Speed
8.6.2
Speed Feedback
Compensation
Pn110
Pn111
Compensates the motor speed using an
observer.
Adjustment is easy because the
compensation can be set as a percentage.
If the speed loop gain increases, the
position loop gain also increases, however
sometimes the servo rigidity decreases.
Position
Speed
8.6.5
Gain Switching
Pn100
Pn101
Pn102
Four parameters, speed loop gain (Kv),
speed loop integral time constant (Ti),
position loop gain (Kp), and 1st Step 1st
torque reference filter time constant (Tf),
are used as conditions for switching and
switching is performed on an external
signal.
Automatic gain switching is easily
achieved using only servo parameter.
The user must select the conditions for
switching.
Position
Speed
8.6.6
Predictive Control
Pn150
Pn151
Pn152
Predictive control is performed to reduce
following error for the position reference.
Adjustment is possible with only one or
two parameters.
Position
8.6.7
Less Deviation
Control
Pn119
Pn11A
Pn11E
Minimizes the error during movement for
position control to reduce settling time
and to reduce locus tracking error.
Adjustment is easy using a single level
with Fn015.
Position
8.6.8
Содержание SGDS Sigma III Series
Страница 3: ...SGDS Sigma III Servo Amplifier User Manual for Mechatrolink II Communications...
Страница 21: ......
Страница 29: ...1 Outline 1 8 2 Connecting to SGMSH SGMGH Servomotors Power Supply Three phase 200VAC SGMGH Servomotor...
Страница 59: ...2 System Selection 2 5 4 Regenerative Resistors 2 28...
Страница 68: ...3 3 SERVOPACK Internal Block Diagrams 3 9 3 3 3 Three phase 200 V 1 0 kW...
Страница 82: ...3 7 Dimensional Drawings of Base mounted SERVOPACK Model SGDS 12A 12A 3 23 Three phase 1 5kW...
Страница 133: ...5 Wiring 5 7 2 Connecting Externally Regenerative Resistors 5 28...
Страница 229: ...7 Operation 7 7 4 Absolute Encoder Home Position Offset 7 38...
Страница 375: ...Sigma II User s Manual Index Index 8...