





























Filter Registers Reference
158
SNIU028A – February 2016 – Revised April 2016
Copyright © 2016, Texas Instruments Incorporated
Filter
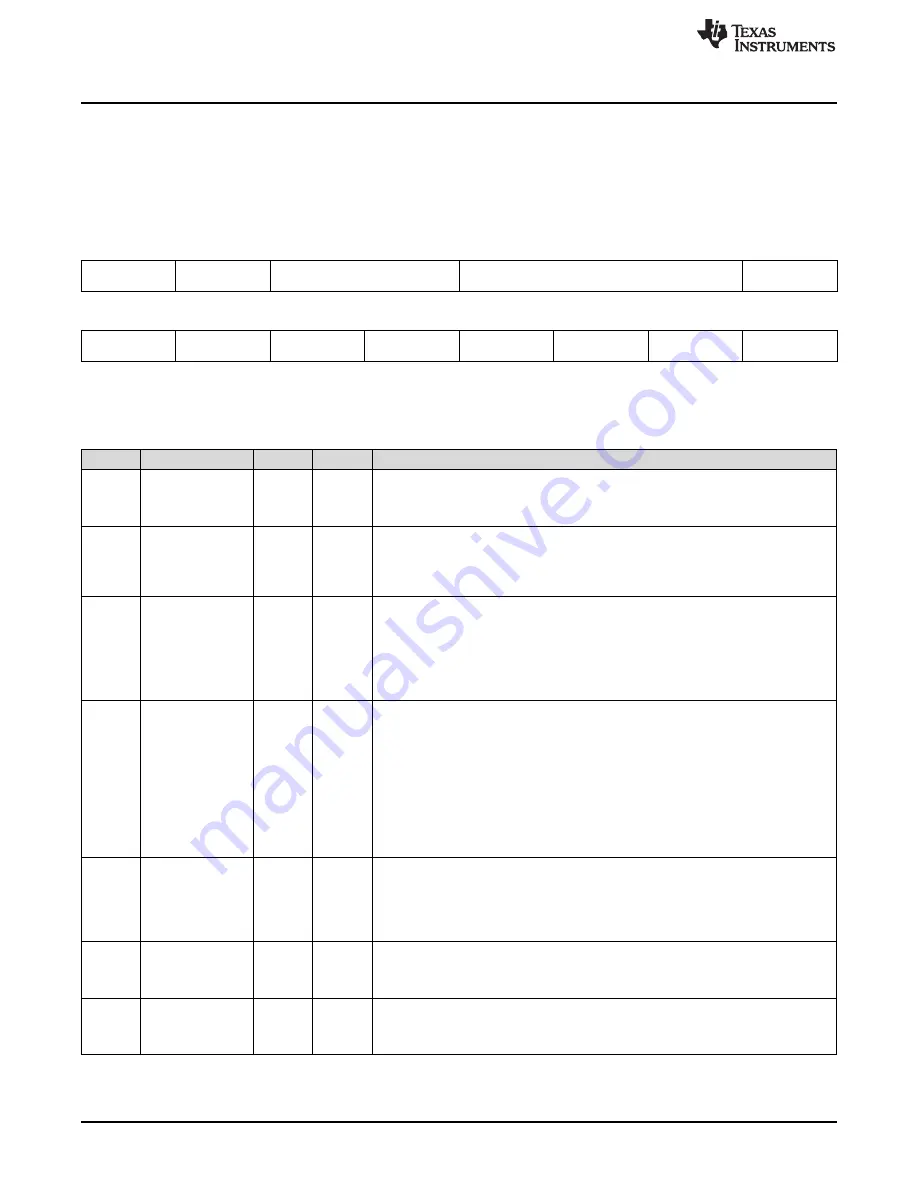
4.11.2 Filter Control Register (FILTERCTRL)
Address 00060004 – Filter 2 Control Register
Address 00090004 – Filter 1 Control Register
Address 000C0004 – Filter 0 Control Register
Figure 4-7. Filter Control Register (FILTERCTRL)
15
14
13
12
11
9
8
KI_ADDER
_MODE
PERIOD_MULT
_SEL
OUTPUT_MULT_SEL
YN_SCALE
NL_MODE
R/W-1
R/W-0
R/W-00
R/W-000
R/W-0
7
6
5
4
3
2
1
0
KD_STALL
KI_STALL
KP_OFF
KD_OFF
KI_OFF
FORCE_
START
USE_CPU_
SAMPLE
FILTER_EN
R/W-0
R/W-0
R/W-0
R/W-0
R/W-0
R/W-0
R/W-0
R/W-1
LEGEND: R/W = Read/Write; R = Read only; -
n
= value after reset
Table 4-2. Filter Control Register (FILTERCTRL) Register Field Descriptions
Bit
Field
Type
Reset
Description
15
KI_ADDER_MODE R/W
1
Configures addition of Xn and Xn-1 in Integral branch
0 = Only Xn used for addition (Xn + 0)
1 = Xn + Xn-1 used for addition (Default)
14
PERIOD_MULT
_SEL
R/W
0
Selects output multiplicand used for multiplying with filter output to calculate DPWM
Period value in Resonant Mode
0 = Switching period received from Loop Mux module (Default)
1 = KComp received from Loop Mux module
13-12
OUTPUT_MULT
_SEL
R/W
00
Selects output multiplicand used for multiplying with filter output to calculate DPWM
Duty value
0 = KComp received from Loop Mux module (Default)
1 = Switching period received from Loop Mux module
2 = Feed-Forward value received from Loop Mux module
3 = Resonant Duty value received from DPWM Module
11-9
YN_SCALE
R/W
000
Controls scaling of Yn value to compensate for filter coefficient scaling
-4 = Filter output (Yn) left shifted by 4
-3 = Filter output (Yn) left shifted by 3
-2 = Filter output (Yn) left shifted by 2
-1 = Filter output (Yn) left shifted by 1
0 = Filter output (Yn) not scaled (Default)
1 = Filter output (Yn) right shifted by 1
2 = Filter output (Yn) right shifted by 2
3 = Filter output (Yn) right shifted by 3
8
NL_MODE
R/W
0
Sets non-linear gain table configuration. Coefficient Bin mapping is controlled by
Coefficient Configuration Register. Limit configuration is controlled by the Filter
Nonlinear Limit Registers (See
0 = Non-symmetric mode (Default)
1 = Symmetric mode
7
KD_STALL
R/W
0
Freezes KD Branch, KD_YN remains at current value
0 = KD_YN recalculated on each filter update (Default)
1 = KD_YN stalled at present value
6
KI_STALL
R/W
0
Freezes KI Branch, KI_YN remains at current value
0 = KI_YN recalculated on each filter update (Default)
1 = KI_YN stalled at present value







































































