





























Commissioning
5.7 Commissioning in torque control mode (T)
SINAMICS V90, SIMOTICS S-1FL6
Operating Instructions, 04/2019, A5E36037884-007
185
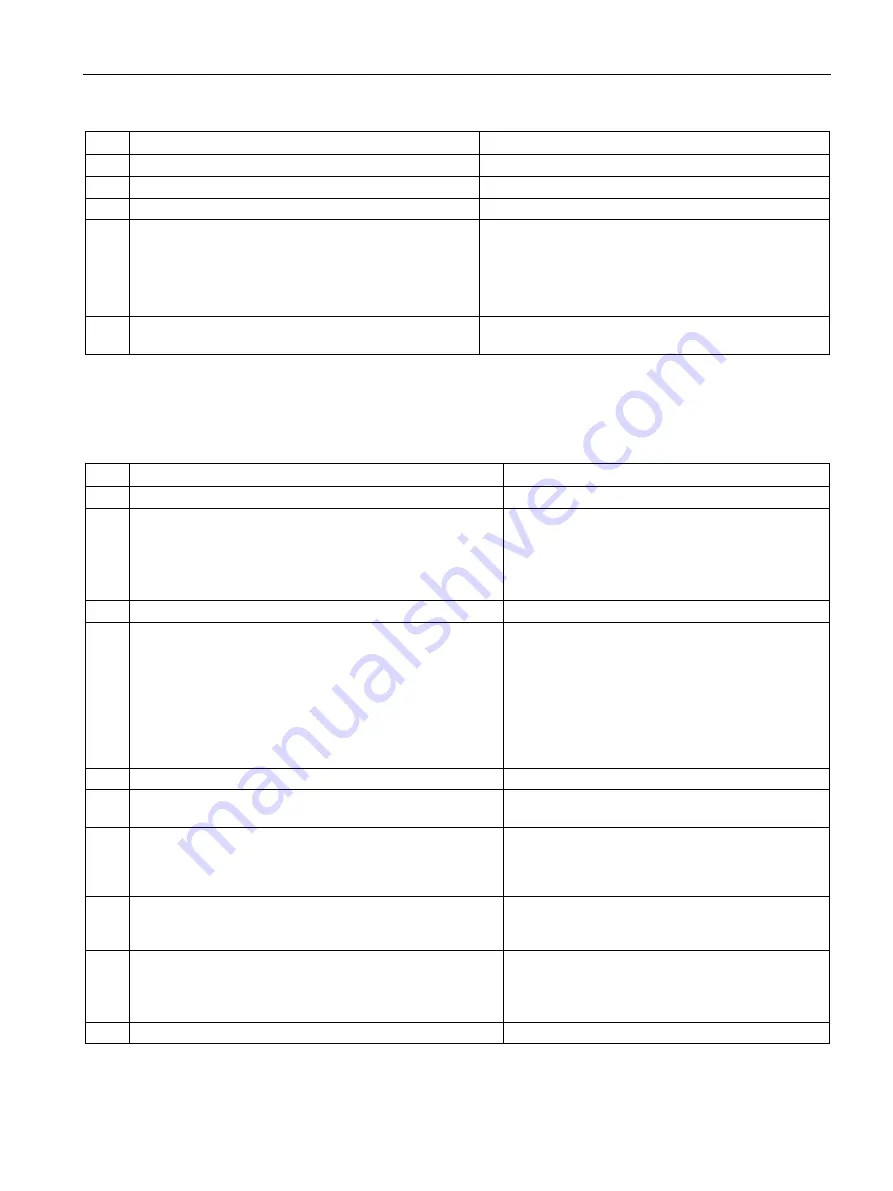
Step
Description
Remarks
11 Save parameters with the BOP.
12 Switch on the line supply.
13 Clear faults and alarms.
Refer to "Diagnostics (Page 383)".
14 Enable the CWE or CCWE and change SON status to
be high level (1) then the servo motor starts running
according to configured speed setpoint.
The actual speed of the servo motor can be viewed from
the BOP operating display.
The default display is the actual speed. You can change
the display by setting the parameter p29002.
Refer to "Actual status display (Page 194)".
15 The system commissioning in speed control mode ends. You can check the system performance. If it is not satis-
fied, you can adjust it. Refer to "Tuning (Page 313)".
5.7
Commissioning in torque control mode (T)
Step
Description
Remarks
1
Switch off the line supply.
2
Power off the servo drive and connect it to the controller (for
example, SIMATIC S7-200 SMART) with the signal cable.
The digital signals CWL, CCWL and EMGS must be
kept at high level (1) to ensure normal operation.
Refer to "Standard application wiring (factory set-
ting) (Page 136)" and "Connection examples with
PLCs (Page 146)".
3
Switch on the 24 VDC power supply.
4
Check the servo motor type.
•
If the servo motor has an incremental encoder, input the
motor ID (p29000).
•
If the servo motor has an absolute encoder, the servo
drive can identify the servo motor automatically.
Fault F52984 occurs when the servo motor is not
identified.
You can find the motor ID from the motor rating
plate. Go to "Motor components (Page 30)" for de-
tailed descriptions about motor rating plate.
Refer to "Basic operations (Page 195)" for infor-
mation about how to change a parameter with the
BOP.
5
Switch to the torque control mode by setting p29003 = 3.
Refer to "Compound controls (Page 209)".
6
Save the parameter and restart the servo drive to apply the
setting of the torque control mode.
7
Select torque setpoint by configuring the digital input signal
TSET.
•
TSET = low level (0): external analog torque
setpoint (analog input 2)
•
TSET = high level (1): fixed torque setpoint
8
If the fixed torque setpoint is used, input your desired torque
setpoint value and offset value into parameter p29043 and
p29042.
Refer to "Torque control with fixed torque setpoint
(Page 263)".
9
If the external analog torque setpoint is used, configure the
scaling (percentage of the rated torque) for analog torque
setpoint corresponding to 10 V by setting parameter
p29041[0].
Refer to "Torque control with external analog torque
setpoint (Page 262)".
10 Set the speed limitation.
Refer to "Speed limit (Page 263)".
Содержание SIMOTICS S-1FL6
Страница 1: ...SINAMICS V90 SIMOTICS S 1FL6 ...
Страница 2: ......
Страница 87: ...Mounting 3 1 Mounting the drive SINAMICS V90 SIMOTICS S 1FL6 Operating Instructions 04 2019 A5E36037884 007 85 ...
Страница 89: ...Mounting 3 1 Mounting the drive SINAMICS V90 SIMOTICS S 1FL6 Operating Instructions 04 2019 A5E36037884 007 87 ...
Страница 342: ...Tuning 9 9 PI P switching SINAMICS V90 SIMOTICS S 1FL6 340 Operating Instructions 04 2019 A5E36037884 007 ...
Страница 384: ...Parameters 10 2 Parameter list SINAMICS V90 SIMOTICS S 1FL6 382 Operating Instructions 04 2019 A5E36037884 007 ...
Страница 432: ......