





























Operation
71
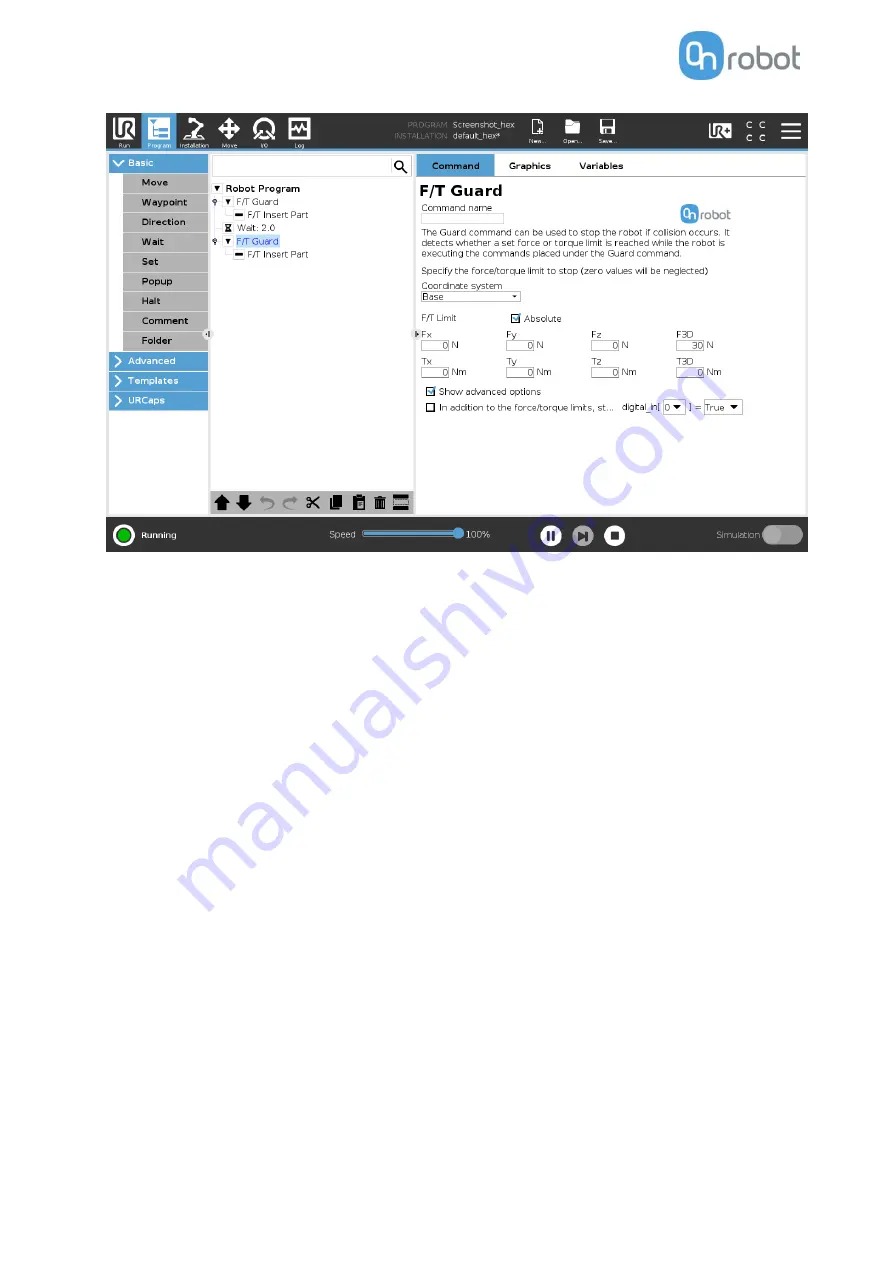
If the
In addition to the force/torque limits, stop if
is enabled, then the set digital I/O will also be
monitored and once the condition is met (along with the force/torque limit) the robot will be stopped.
(e.g.: stop
if Fz>5 AND digital_in[7] == True
).
This command has no return value, and halts the program when limits are reached.
Содержание VGC10
Страница 1: ...USER MANUAL FOR UR ROBOTS ORIGINAL INSTRUCTION EN v1 05...
Страница 28: ...Installation 28 5 Initialize the robot...
Страница 152: ...Hardware Specification 152 RG2 FT GrippingSpeedGraph GripperWorkingRange The dimensionsare in millimeters...
Страница 156: ...Hardware Specification 156 RG2 GrippingSpeedGraph RG2 Work Range...
Страница 159: ...Hardware Specification 159 RG6 GrippingSpeedGraph RG6 Work Range...
Страница 185: ...Hardware Specification 185 Gecko All dimensionsare in mm and inches...
Страница 186: ...Hardware Specification 186 RG2 FT All dimensionsare in mm and inches...
Страница 187: ...Hardware Specification 187 RG2 All dimensionsare in mm and inches...
Страница 188: ...Hardware Specification 188 RG6 All dimensionsare in mm and inches...
Страница 189: ...Hardware Specification 189 VG10 All dimensionsare in mm and inches...
Страница 190: ...Hardware Specification 190 All dimensionsare in mm and inches...
Страница 191: ...Hardware Specification 191 VGC10 All dimensionsare in mm and inches...
Страница 192: ...Hardware Specification 192 All dimensionsare in mm and inches...
Страница 193: ...Hardware Specification 193 Quick Changer Tool side All dimensionsare in mm and inches...
Страница 200: ...Certifications 200 10 Certifications...
Страница 201: ...Certifications 201...
Страница 202: ...Certifications 202...
Страница 203: ...Certifications 203...
Страница 204: ...Certifications 204...
Страница 205: ...Certifications 205...