





























Operation
65
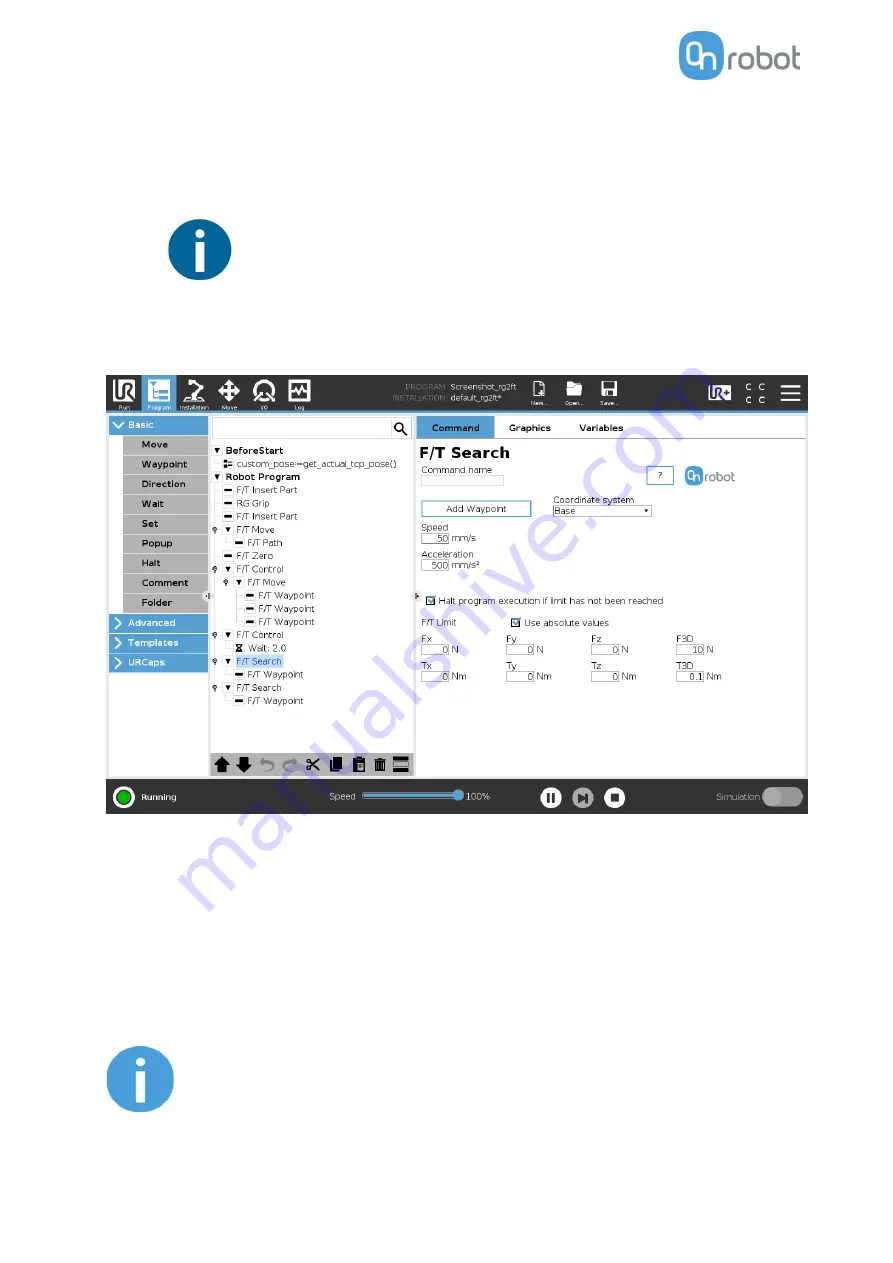
F/T Search
The
F/T Search
command is used together with the
F/T Waypoint
command, to move the robot
along a route, or together with the
F/T Path
to move the robot along a Path and stop once the defined
force/torque limits are reached (object found). If the movement reaches the last waypoint or the last
point of the path, the search is not successful (the object is not found) and a warning is generated.
NOTE:
To cancel any force/torque offset, execute an
F/T Zero
command at the
beginning of the
F/T Search
command and make sure the tool is not in
contact with any object before starting the
F/T Search
, otherwise the
command may not stop at the given force/torque limit.
To operate the
F/T Search
command tap on the
Add Waypoint
button to add an
F/T Waypoint
as a
child node. More waypoints can be added in the same way. To remove a waypoint, use the
Structure
tab
Delete
button.
Alternatively,
F/T Waypoint
or
F/T Path
could be added as a child node of the
F/T Search
command by using the
Structure
tab.
Speed
:
The movement speed while searching for collision. The movement is carried out in a constant
translational speed. If the route or path has sharp changes in the direction, or the orientation, the actual
speed of the robot may be less than specified, but still constant throughout the route or Path.
NOTE:
Overshooting can occur during search, especially with hard contacts (e .g.
metal surfaces). To limit overshoots you should lower the speed.
Содержание VGC10
Страница 1: ...USER MANUAL FOR UR ROBOTS ORIGINAL INSTRUCTION EN v1 05...
Страница 28: ...Installation 28 5 Initialize the robot...
Страница 152: ...Hardware Specification 152 RG2 FT GrippingSpeedGraph GripperWorkingRange The dimensionsare in millimeters...
Страница 156: ...Hardware Specification 156 RG2 GrippingSpeedGraph RG2 Work Range...
Страница 159: ...Hardware Specification 159 RG6 GrippingSpeedGraph RG6 Work Range...
Страница 185: ...Hardware Specification 185 Gecko All dimensionsare in mm and inches...
Страница 186: ...Hardware Specification 186 RG2 FT All dimensionsare in mm and inches...
Страница 187: ...Hardware Specification 187 RG2 All dimensionsare in mm and inches...
Страница 188: ...Hardware Specification 188 RG6 All dimensionsare in mm and inches...
Страница 189: ...Hardware Specification 189 VG10 All dimensionsare in mm and inches...
Страница 190: ...Hardware Specification 190 All dimensionsare in mm and inches...
Страница 191: ...Hardware Specification 191 VGC10 All dimensionsare in mm and inches...
Страница 192: ...Hardware Specification 192 All dimensionsare in mm and inches...
Страница 193: ...Hardware Specification 193 Quick Changer Tool side All dimensionsare in mm and inches...
Страница 200: ...Certifications 200 10 Certifications...
Страница 201: ...Certifications 201...
Страница 202: ...Certifications 202...
Страница 203: ...Certifications 203...
Страница 204: ...Certifications 204...
Страница 205: ...Certifications 205...