





























NOVA electronics Inc.
MCX514 -
63
-
63
-
Description 10: General purpose input signal Hi and the change of when falling
About “nPIOm input Hi and nPIOk
input ↓”, it is activated when nPIOm (m=4~7) input signal is Hi level and nPIOk (k
=0~3) input signal is falling from Hi level to Low level.
As shown in the table, the nPIOk, nPIOm signals corresponding to 4 synchronous action sets are fixed.
If nPIOm input signal is already Hi level and nPIOk input signal is Low level when the synchronous action is enabled,
the behavior is the same as the description 6.
Description 11: NOP
It uses when the user does not set the condition of activation factor.
For instance, when the other SYNC activation is used in mode setting, the activation factor of a synchronous action set
to be activated should be set to NOP.
2.6.2
Action
Activated actions are shown in the table below. Actions of code 01~09h, 0Fh, 10h are different depending on the synchronous
action set 0 to 4.
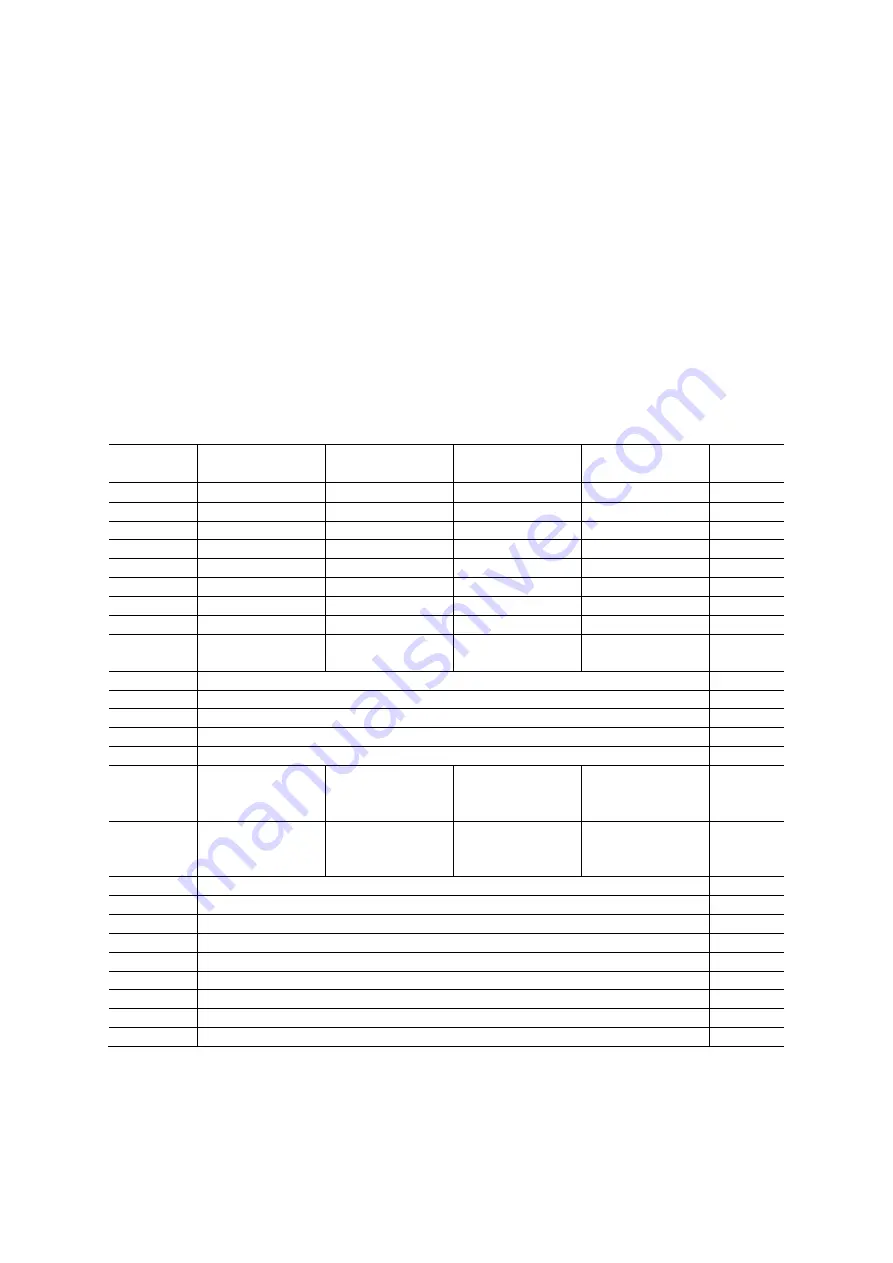
Table 2.6-2 Actions
Code (Hex)
Synchronous action
set 0 SYNC0
Synchronous action
set 1 SYNC1
Synchronous action
set 2 SYNC2
Synchronous action
set 3 SYNC3
Description
01
MR0 → DV
MR1 → DV
MR2 → DV
MR3 → DV
1
02
MR0 → TP
MR1 → TP
MR2 → TP
MR3 → TP
1
03
MR0 → SP1
MR1 → SP1
MR2 → SP1
MR3 → SP1
1
04
MR0 → LP
MR1 → RP
MR2 → SV
MR3 → AC
1
05
LP → MR0
LP → MR1
LP → MR2
LP → MR3
2
06
RP → MR0
RP → MR1
RP → MR2
RP → MR3
2
07
CT → MR0
CT → MR1
CT → MR2
CT → MR3
2
08
CV → MR0
CA → MR1
-
-
2
09
nPIO0 signal pulse
output
nPIO1 signal pulse
output
nPIO2 signal pulse
output
nPIO3 signal pulse
output
3
0A
Start of relative position driving
0B
Start of counter relative position driving
0C
Start of absolute position driving
0D
Start of
+
direction continuous pulse driving
0E
Start of
-
direction continuous pulse driving
0F
Start of relative
position driving using
MR0 value
Start of relative
position driving using
MR1 value
Start of relative
position driving using
MR2 value
Start of relative
position driving using
MR3 value
4
10
Start of absolute
position driving using
MR0 value
Start of absolute
position driving using
MR1 value
Start of absolute
position driving using
MR2 value
Start of absolute
position driving using
MR3 value
4
11
Decelerating stop
5
12
Instant stop
5
13
Drive speed increase
6
14
Drive speed decrease
6
15
Timer-start
16
Timer-stop
17
Start of split pulse
7
18
Termination of split pulse
7
00
NOP
8





















































