





























2 CONTROL MODE
2.1 Control mode [G] [WG]
39
2
■
Controlword/Statusword
By changing [Controlword (Obj. 6040h)], control commands can be given to the servo amplifier. The control status can also be
checked with [Statusword (Obj. 6041h)].
Some bits of [Controlword (Obj. 6040h)] and [Statusword (Obj. 6041h)] vary depending on the control mode. The bits that vary
depending on the control mode are listed in the following tables.
• Controlword OMS Bit (ct)
• Statusword OMS Bit (ct)
■
Control mode switching
For information on the control switching, refer to "Control switching for continuous operation to torque control mode (ct)" in the
User's Manual (Communication Function).
■
Setting the torque feedback control gain
In the continuous operation to torque control mode, use the initial value of [Pr. PB03 Torque feedback loop gain] for the torque
feedback gain. If the response is not satisfactory, adjust the torque feedback gain.
Page 41 Parameter adjustment method
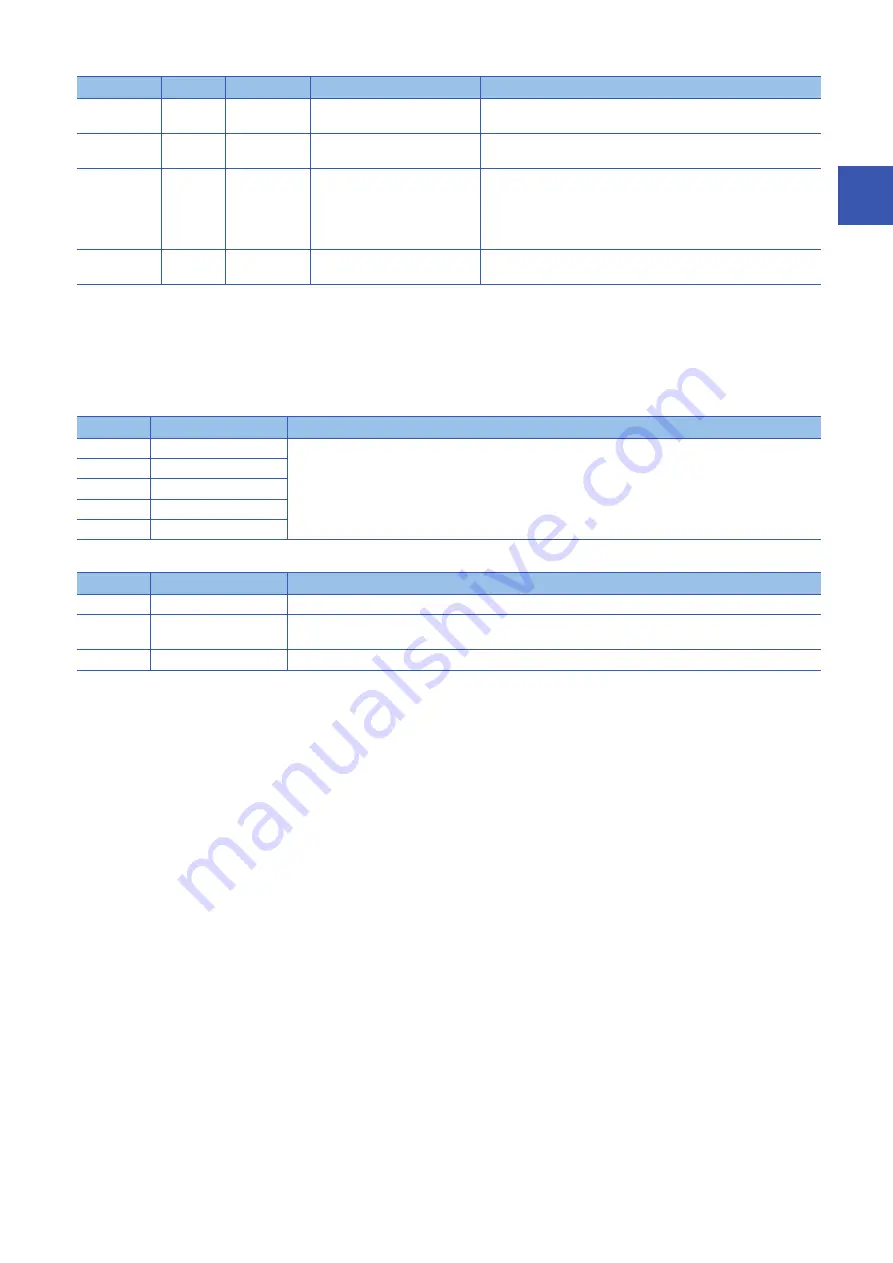
2D20h
VAR
Velocity limit value
Speed limit value
Unit: vel units
60A8h
VAR
SI unit position
SI unit position
00000000 (1 pulse)
60A9h
VAR
SI unit velocity
SI unit velocity
The SI unit velocity is returned.
FEB44700h (0.01 r/min)
FB010300h (0.01 mm/s)
00000300h (pulse/s)
60B2h
VAR
Torque offset
Torque offset
Unit: 0.1 % (with rated torque being 100 %)
Bit
Symbol
Description
4
(reserved)
The value at reading is undefined. Set "0" when writing.
5
(reserved)
6
(reserved)
8
(reserved)
9
(reserved)
Bit
Symbol
Description
10
(reserved)
The value at reading is undefined.
12
Target torque ignored
0: Target torque is being discarded.
1: Target torque is being used as a continuous operation to torque control loop input.
13
(reserved)
The value at reading is undefined.
Index
Sub
Object
Name
Description







































































