





























2 CONTROL MODE
2.1 Control mode [G] [WG]
21
2
*1 This object may not be used depending on the network being used. For details, refer to the User's Manual (Object Dictionary).
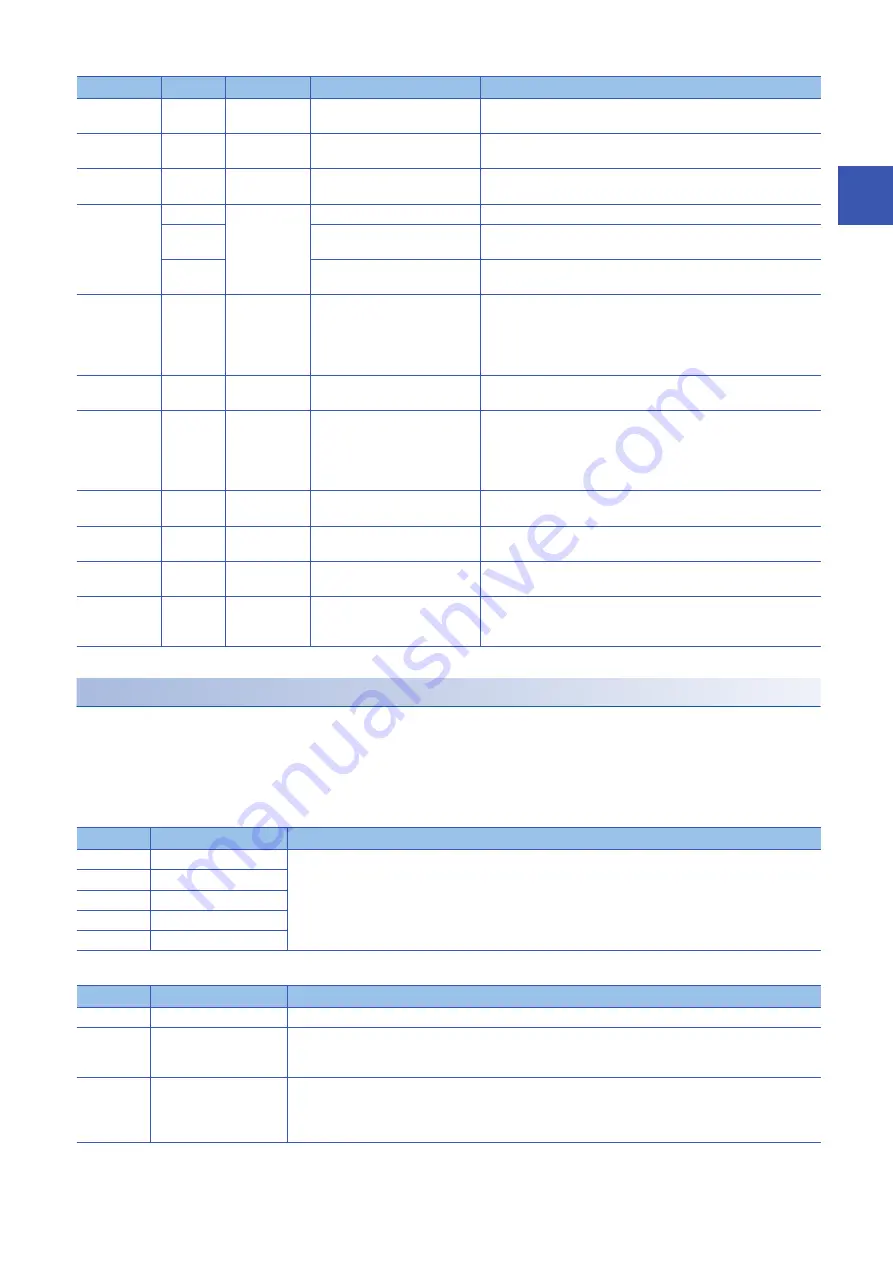
Controlword/Statusword
By changing [Controlword (Obj. 6040h)], control commands can be given to the servo amplifier. The control status can also be
checked with [Statusword (Obj. 6041h)].
Some bits of [Controlword (Obj. 6040h)] and [Statusword (Obj. 6041h)] vary depending on the control mode. The bits that vary
depending on the control mode are listed in the following tables.
■
Controlword OMS Bit (csp)
■
Statusword OMS Bit (csp)
60FAh
VAR
Control effort
Position control loop output (speed command)
Unit: vel units
60E0h
VAR
Positive torque limit value
Torque limit value (forward)
Unit: 0.1 % (with rated torque being 100 %)
60E1h
VAR
Negative torque limit value
Torque limit value (reverse)
Unit: 0.1 % (with rated torque being 100 %)
6091h
0
ARRAY
Gear ratio
Gear ratio
1
Motor revolutions
Number of revolutions of the servo motor shaft (numerator)
Page 105 Electronic gear function [G] [WG]
2
Shaft revolutions
Number of revolutions of the drive shaft (denominator)
Page 105 Electronic gear function [G] [WG]
607Eh
VAR
Polarity
Polarity selection
Bit 7: Position POL
Bit 6: Velocity POL
Bit 5: Torque POL
Page 86 Rotation/travel direction selection [G] [WG]
60A8h
VAR
SI unit position
SI unit position
00000000h (1 pulse)
60A9h
VAR
SI unit velocity
SI unit velocity
The SI unit velocity is returned.
FEB44700h (0.01 r/min)
FB010300h (0.01 mm/s)
00000300h (pulse/s)
60B0h
VAR
Position offset
Position offset
Unit: pos units
60B1h
VAR
Velocity offset
Velocity offset
Unit: vel units
60B2h
VAR
Torque offset
Torque offset
Unit: 0.1 % (with rated torque being 100 %)
6062h
VAR
Position demand value
Command position (absolute position)
The command position inside the servo amplifier is returned.
Unit: pos units
Bit
Symbol
Description
4
(reserved)
The value at reading is undefined. Set "0" when writing.
5
(reserved)
6
(reserved)
8
(reserved)
9
(reserved)
Bit
Symbol
Description
10
(reserved)
The value at reading is undefined.
12
Drive follows the command
value
(Target position ignored)
0: [Target position (Obj. 607Ah)] is being discarded.
1: [Target position (Obj. 607Ah)] is being used as a position control loop input.
13
Following error
0: No following error
1: Following error
When the time set in [Following error time out (Obj. 6066h)] elapses in a state where the value of [Following error
actual value (Obj. 60F4h)] exceeds the value set in [Following error window (Obj. 6065h)], this bit becomes "1".
Index
Sub
Object
Name
Description







































































