





























83
item Controller BL 1-04 /C
― Product manual
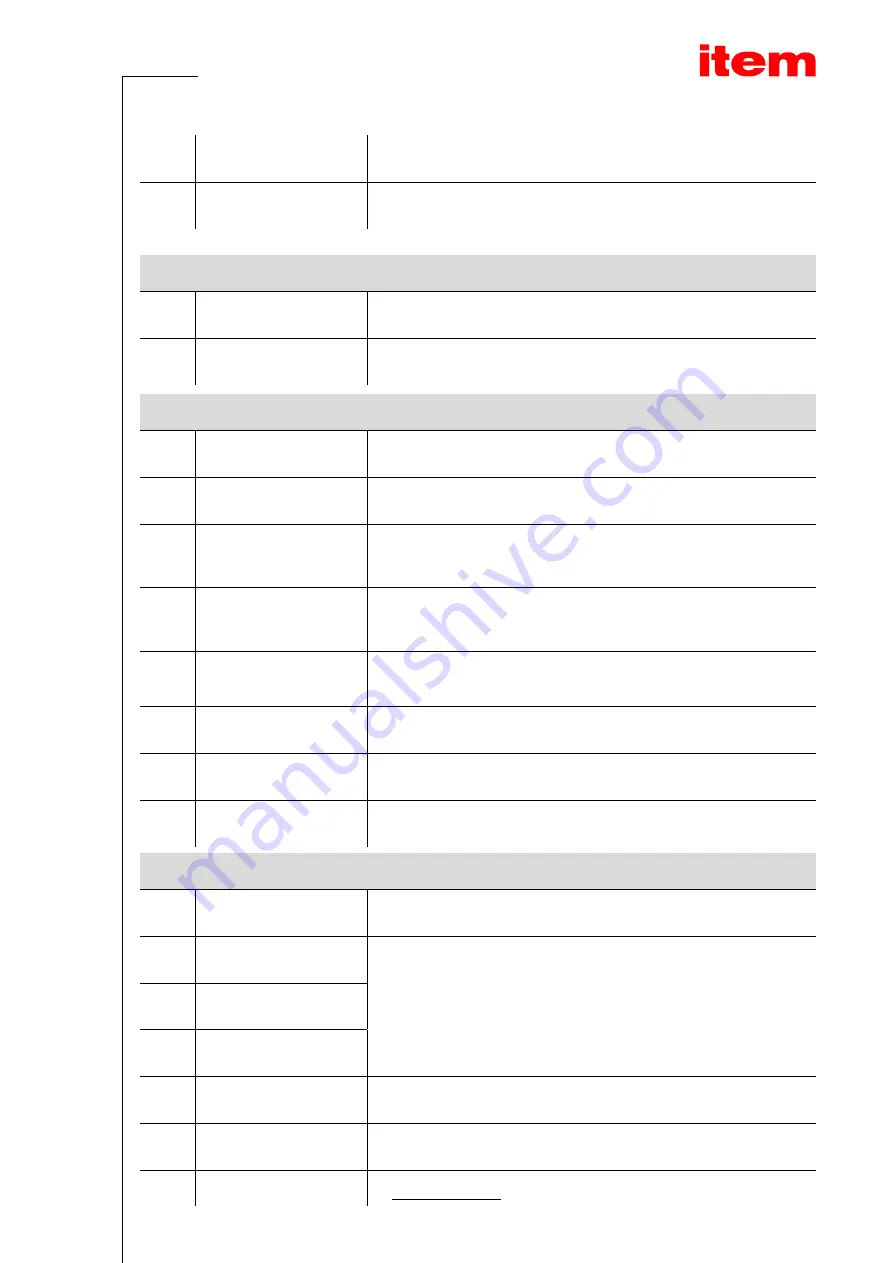
9-7
Encoder EEPROM is write
protected
Please contact the Technical Support team.
9-9
Too small memory size of
encoder EEPROM
Please contact the Technical Support team.
Group 10: Motor overspeed protection
10-0
Overspeed (motor over
-
speed protection)
Check the offset angle. Check the parameterisation of the limit value.
10-1
Overspeed according to
Dual-Use Regulation 600 Hz Please contact the Technical Support team.
Group 11: Homing run
11-0
Error when homing run is
started
Servo drive not enabled.
11-1
Error during homing run
The homing run has been interrupted, e.g. because the enable signal has been
withdrawn.
11-2
Homing: no valid index pulse The required index pulse is not provided. Check the index pulse. Check the angle
encoder settings
11-3
Homing: timeout
The maximum permissible time for the homing run has been reached before the
homing run could be completed. Check the time value.
11-4
Homing: incorrect / invalid
limit switch
Has the associated limit switch not been connected? Have the limit switches
been mixed up?
11-5
Homing: I²t / following error Unsuitable parameterisation of the acceleration ramps. The stop has been
reached, e.g. because no reference switch has been installed.
11-6
Homing: end of search
distance reached
The maximum distance for the homing run has been covered, but the reference
point or the target of the homing run have not been reached.
11-7
Homing: encoder difference
monitoring
The deviation fluctuates, e.g. due to gear slackness. If necessary, increase the
switch-off threshold. Check the connection of the actual value encoder.
Group 12: CAN communication
12-0
CAN: duplicate node
number
Check the configuration of the devices that are connected to the CAN bus.
12-1
CAN: communication error,
bus OFF
Check the wiring: compliance with the cable specification, cable break, maxi
-
mum cable length exceeded, correct terminating resistors, cable shield earthed,
all signals connected?
12-2
CAN: communication error
(sending)
12-3
CAN: communication error
(receiving)
12-4
CAN: Node Guarding
Failure of the PLC or the cycle time of the remote frames of the servo drive and
PLC do not match.
12-5
CAN: RPDO too short
The number of bytes of a received RPDO is smaller than the number that is
parameterised in the servo drive.
12-9
CAN: protocol error
Please contact the Technical Support team.







































































