





























19
item Controller BL 1-04 /C
― Product manual
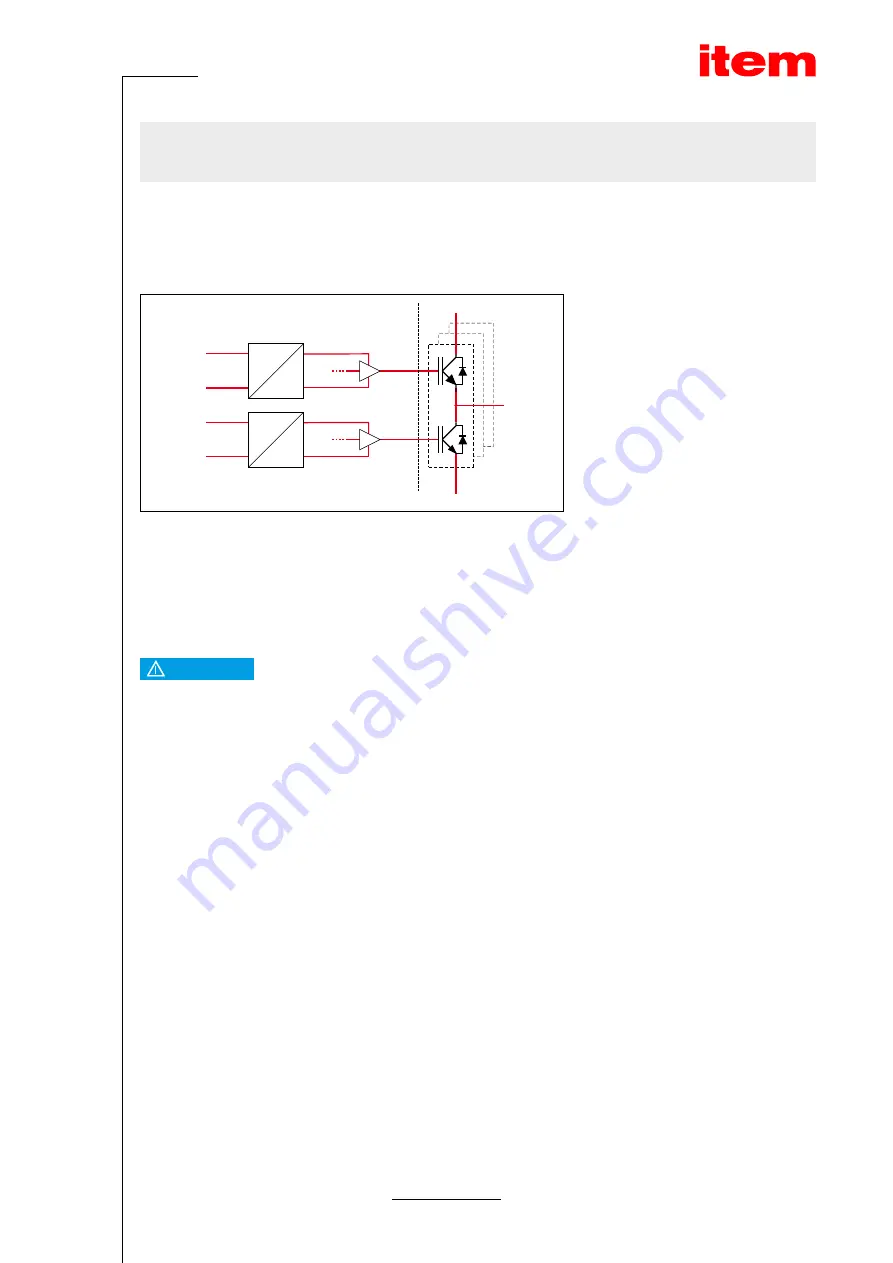
4.5.1 Description of the STO safety function
Use the "Safe Torque Off" (STO) function if you need to disconnect the motor safely from the energy supply for your applica
-
tion. The "Safe Torque Off" function switches off the driver supply for the power semiconductors. This prevents the power
output stage from providing the voltage that is required by the motor. As a result, the motor cannot start unexpectedly. See the
following illustration.
DC
DC
DC
DC
ZK+
ZK-
U / V / W
STOA
STOB
GNDA
GNDB
+5V_OS
+5V_US
Figure 4: "Safe Torque Off" - principle of operation
When the "Safe Torque Off" (STO) function is active, the energy supply to the drive is interrupted in a safe manner. The drive
can neither generate any torque nor any dangerous movements. In the case of suspended loads or other external forces, addi
-
tional measures must be taken in order to prevent the load from sagging (e.g. mechanical holding brakes). In the "Safe Torque
Off" (STO) state, the standstill position will not be monitored.
NOTICE
Risk of a jerky movement of the drive in the case of multiple errors
If the output stage of the servo drive fails while in the STO state (simultaneous short circuit of 2 power semiconductors in dif
-
ferent phases), a limited dwell movement of the rotor may result. The angle of rotation/distance corresponds to one pole pitch.
Examples:
▪ Rotary axis, synchronous machine, 8 poles
→ movement < 45° of the motor shaft.
▪ Linear motor, pole pitch 20 mm
→ movement < 20 mm of the moved part.







































































