





























item Controller BL 1-04 /C
― Product manual
24
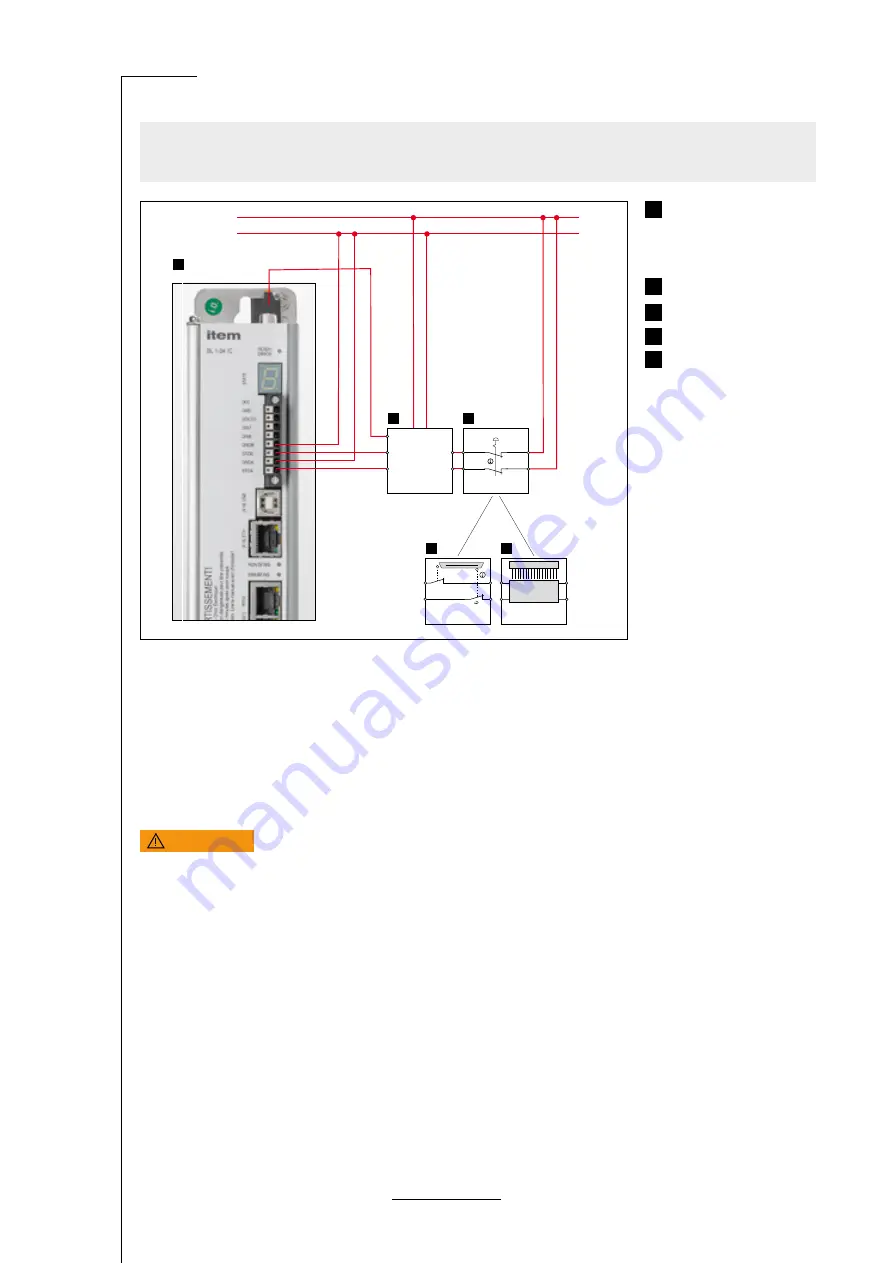
4.6.2 Deceleration and safe torque switch off (SS1, "Safe Stop 1")
OSSD
k1_in
k1_delay
k1_out
24V DC
0V DC
X1, DIN5
1
3
K1
S1
2a
2b
2c
1
Servo drive with an integ
-
rated STO function (only
the relevant connect ions
are shown)
2a
Emergency stop button
2b
Safety gate
2c
Light grid
3
Safety relay K1 with a
delayed output
Figure 7: Circuit example "Deceleration and safe torque switch-off" (SS1, "Safe Stop 1") (single-phase servo drive)
The safety function "Safe Stop 1" (SS1, type C) can be requested by various devices. The switch S1 can be, for example, an
emergency-stop switch, the switch of a safety gate or a light grid. The safety request is transferred to the safety relay via two
channels and via the switch S1.
The safety relay disables the servo drive. When the servo drive is disabled, the movement will be automatically decelerated.
If a brake is configured, the system waits for the activation of the brake. Then, the control circuit will be switched off. After a
certain time that is defined in the safety relay, the output stage will be switched off via two channels via STOA/B.
WARNING
Hazards due to the loss of the safety function
A loss of the safety function can result in serious, irreversible injuries, e.g. due to uncontrolled movements of the connected
actuators.
Use the integrated STO safety function only if all of the required safety measures have been implemented. Validate the safety
function at the end of the commissioning process. See section 4.9 Functional test, validation on page 27.
Incorrect wiring or the use of external components that have not been selected in line with the safety category will result in a
loss of the safety function.
Perform a risk assessment for your application and select the circuitry and components accordingly.
Notes concerning the circuit example
▪ The safety relay that is used must switch off the servo drive enable signal (X1, pin 9, DIN5) without any delay and the inputs
STOA and STOB (X3, pin 1, pin 3) with a delay.
▪ The necessary delay depends on the application and must be determined specifically for the application. The delay must
be chosen so that, even at top speed, the drive is decelerated to zero speed by way of the quick-stop ramp before the inputs
STOA and STOB are switched off.
▪ The electrical installation must fulfil the requirements of the applicable standards listed in section 1.4 Applicable stand
-
ards on page 7. If, for example, the safety relay and the servo drive are located inside the same control cabinet, it can be







































































