





























Goodrive350 IP55 High-ingress Protection Series VFD
Function parameter list
-221-
Function
code
Name
Description
Default
value
Modify
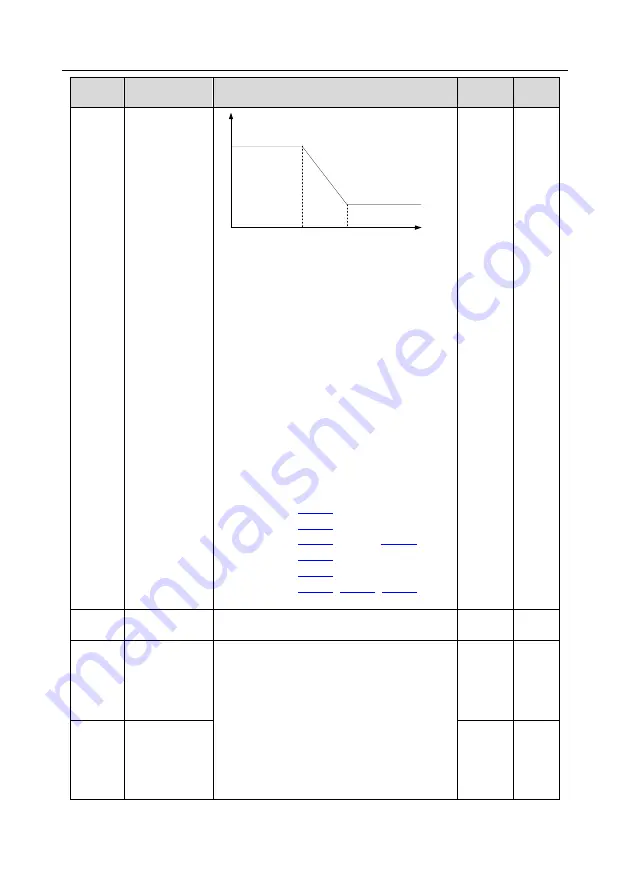
PI parameters
Output frequency f
(P23.00,P23.01)
(P23.03,P23.04)
P23.02
P23.05
The
speed
loop
dynamic
response
characteristics of vector control can be adjusted
by setting the proportional coefficient and
integral time of speed regulator. Increase
proportional gain or decrease integral time can
accelerate dynamic response of speed loop,
however, if the proportional gain is too large or
integral time is too small, system oscillation and
large overshoot may occur; if proportional gain
is too small, stable oscillation or speed offset
may occur.
Speed loop PI parameter is closely related to the
system inertia, users should make adjustment
according to different load characteristics based
on the default PI parameter to fulfill different
needs.
Setting range of
: 0.0
–200.0
Setting range of
: 0.000
–10.000s
Setting range of
: 0.00Hz
Setting range of
: 0.0
–200.0
Setting range of
: 0.000
–10.000s
Setting range of
output frequency)
P23.06
Speed loop
output filter
0
–8 (corresponds to 0–2^8/10ms)
0
○
P23.07
Slip
compensation
coefficient of
vector control
(motoring)
Slip compensation coefficient is used to adjust
the slip frequency of vector control to improve
system speed control precision. Users can
effectively control the static error of speed by
adjusting this parameter properly.
Setting range: 50
–200%
100%
○
P23.08
Slip
compensation
coefficient of
vector control
(generating)
100%
○
Содержание GD350-004G/5R5P-45-AS
Страница 1: ...Goodrive350 IP55 High ingress Protection Series VFD ...
Страница 372: ...202008 V1 0 6 6 0 0 1 0 0 7 4 8 202203 V1 3 ...







































































