





























6
Positioning mode
104
Festo – GDCP-CMMS-AS-G2-FW-EN – 1310NH – English
6.8
Jog operation
6.8.1
Function: jog operation
The motor controller can be controlled in jog operation directly via the active fieldbus (CANopen/
PROFIBUS DP/DeviceNet), the digital inputs (mode 1
page 22) or the parameter interface (RS232,
Festo Configuration Tool (FCT)). Through the direct application of the fieldbus, the digital inputs “Jog+
(DIN10)/Jog– (DIN11)” or the Festo Configuration Tool (FCT) “Jog<</Jog>>”, the controller-internal posi-
tioning control receives the travel direction for jog operation. The controller-internal positioning con-
troller calculates the jog curve from the jog parameters and transfers the position setpoint values cyc-
lically to the position control. In jog operation, the drive first runs at creep speed in order to approach a
position accurately. If after expiration of the creep duration the activation continues to be active, the
drive continues at jog speed in order to travel through large paths quickly. Jog operation is quit with the
falling edge of the jog signal.
This operating mode can be used in the following applications:
–
Approaching the teach position
–
Drive free running (e.g. after a malfunction)
–
Manual running (manually operated feed)
The jog parameters can be parametrised via fieldbus or Festo Configuration Tool (FCT).
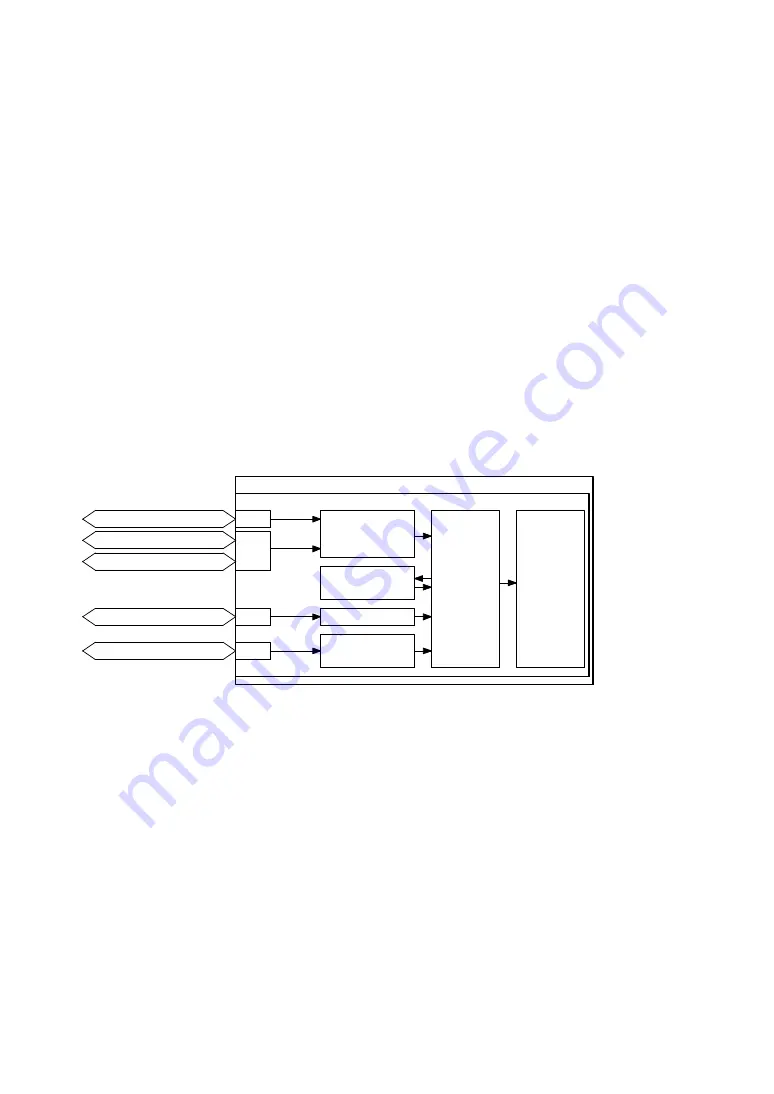
6.8.2
Activate jog operation via fieldbus/digital inputs
X4
CMMS-AS-...-G2
CANopen
PROFIBUS DP
Digital inputs
Fieldbus
Control section
X1
EXT
DeviceNet
Inputs
Direct application
Jog parameters
Jog+/–
X5
RS232
“FCT” software
Jog>> (+)
Jog<< (–)
Position
control
Controller-
internal po-
sitioning
control
Fig. 6.26 Overview: activate jog operation via fieldbus or digital inputs
Содержание CMMS-AS-G2 Series
Страница 1: ...Description Functions Firmware design from 1 4 0 2 6 8026161 1310NH Motor controller CMMS AS G2 ...
Страница 173: ......





















































