





























6.2 Wiring Encoders
6-7
6
Wiring
(b) Setting Parameters
6.2 Wiring Encoders
The connection cables between encoder and SERVOPACK and wiring pin numbers differ depending on servo-
motor model. Refer to
Chapter 5 Specifications and Dimensional Drawings of Cables and Peripheral Devices
for details.
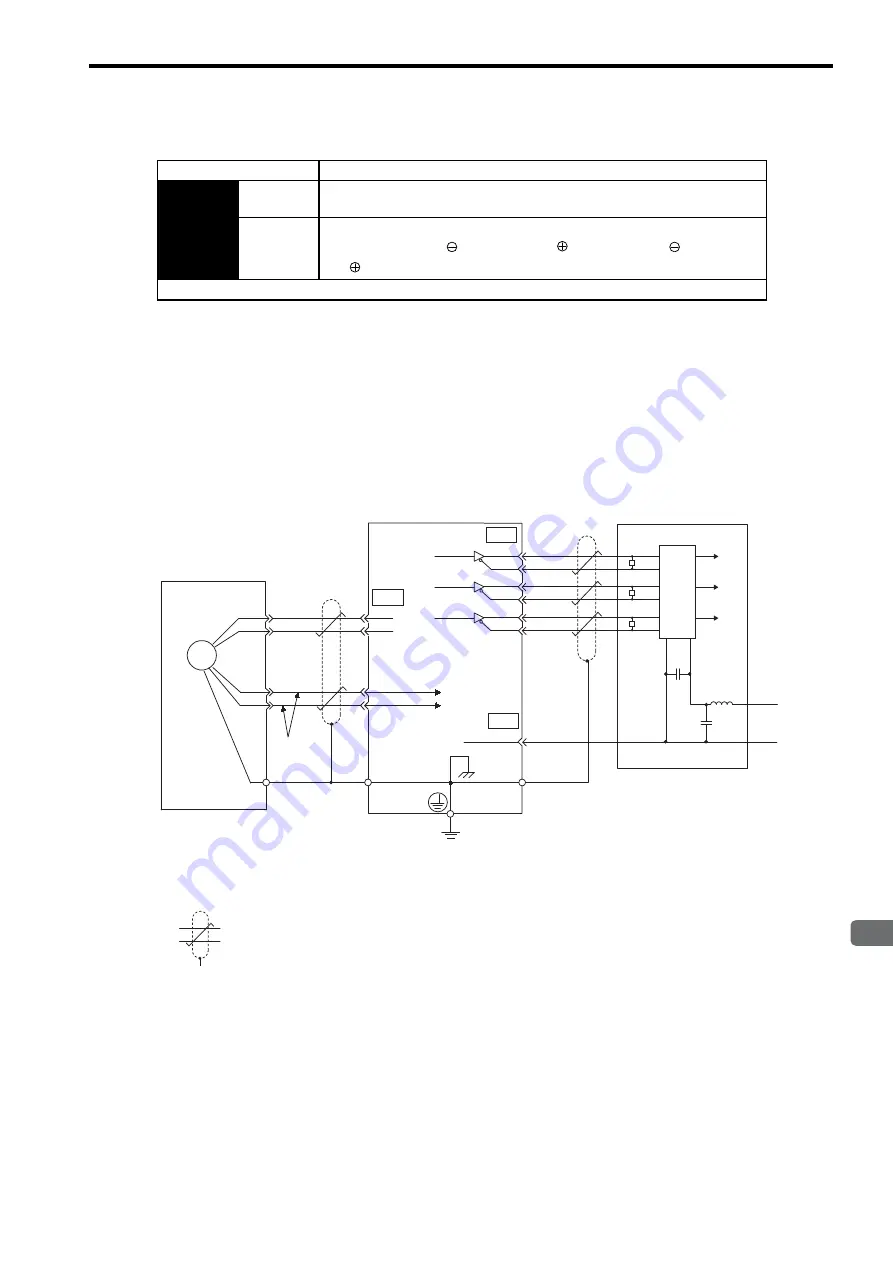
6.2.1 Connecting an Encoder (CN2) and Output Signals from the SERVOPACK
(CN1)
(1) Incremental Encoders
Parameter
Meaning
Pn001
n.
0
Not applicable for main circuit DC power supply input: Input the AC power sup-
ply for the terminal L1, L2 or L3.
n.
1
Applicable for main circuit DC power supply input: Input the DC power supply
between the terminal
and the terminal
1, or the terminal
and the termi-
nal .
• When changing the parameters, turn the power ON again for the necessity of the effective setting.
35
0 V
SG
1
0 V
0 V
+5 V
+5 V
PAO
/PAO
PBO
/PBO
PCO
/PCO
PG5V
PG0V
1
2
5
6
CN2
33
34
36
19
20
PG
CN1
0.33 mm
2
Light blue
PG
5 V
PG
0 V
PS
/PS
White/Light blue
Incremental
encoder
Red
Black
Shield wire
(Shell)
Connector shell
Connector
shell
Output line-driver SN75ALS194
manufactured by Texas
Instruments or the equivalent.
Phase A
Phase
A
Phase B
Phase
B
Phase C
Phase
C
SERVOPACK
Line receiver
Host controller
Choke
coil
Smoothing
capacitor
R (terminator): 220 to 470
Ω
C (Decoupling Capacitor)
㧦
0.1
μ
F
CN1
11
5
3
2
1
R
R
R
6
7
10
9
8
16
C
+
-
: represents twisted-pair wires.
The pin numbers for the connector wiring differ depending on the servomotors.
C, D, H, G : pin number for the SGMGH, SGMSH, SGMDH servomotors.
1, 2, 5, 6 : pin number for the SGMAH and SGMPH servomotors.
∗
1
∗
2
C (5)
∗
2
∗
2
D (6)
H (1)
G (2)
∗
1
Summary of Contents for Sigma-II Series
Page 384: ...8 3 8 Operation...







































































