





























1.2 Introduction to EtherCAT
1.2.1 Introduction to CANopen
1-3
1
Basic Information on SER
VOP
ACKs
1.2
Introduction to EtherCAT
The CANopen over EtherCAT (CoE) Communications Reference SERVOPACKs implement the
CiA 402 CANopen drive profile for EtherCAT communications (real-time Ethernet communica-
tions).
Basic position, speed, and torque control are supported along with synchronous position,
speed, and torque control. You can select the type of control to match your system from basic
positioning to high-speed, high-precision path control.
You can also use EtherCAT communications to control the high-level servo control perfor-
mance, advanced turning functions, and many actuators of the
Σ
-7 Series.
1.2.1
Introduction to CANopen
The CiA 402 CANopen profile is based on the IEC 61800-7-1, IEC61800-7-201, and IEC
61800-7-301 standards for international standardization of drive control and operation control.
1.2.2
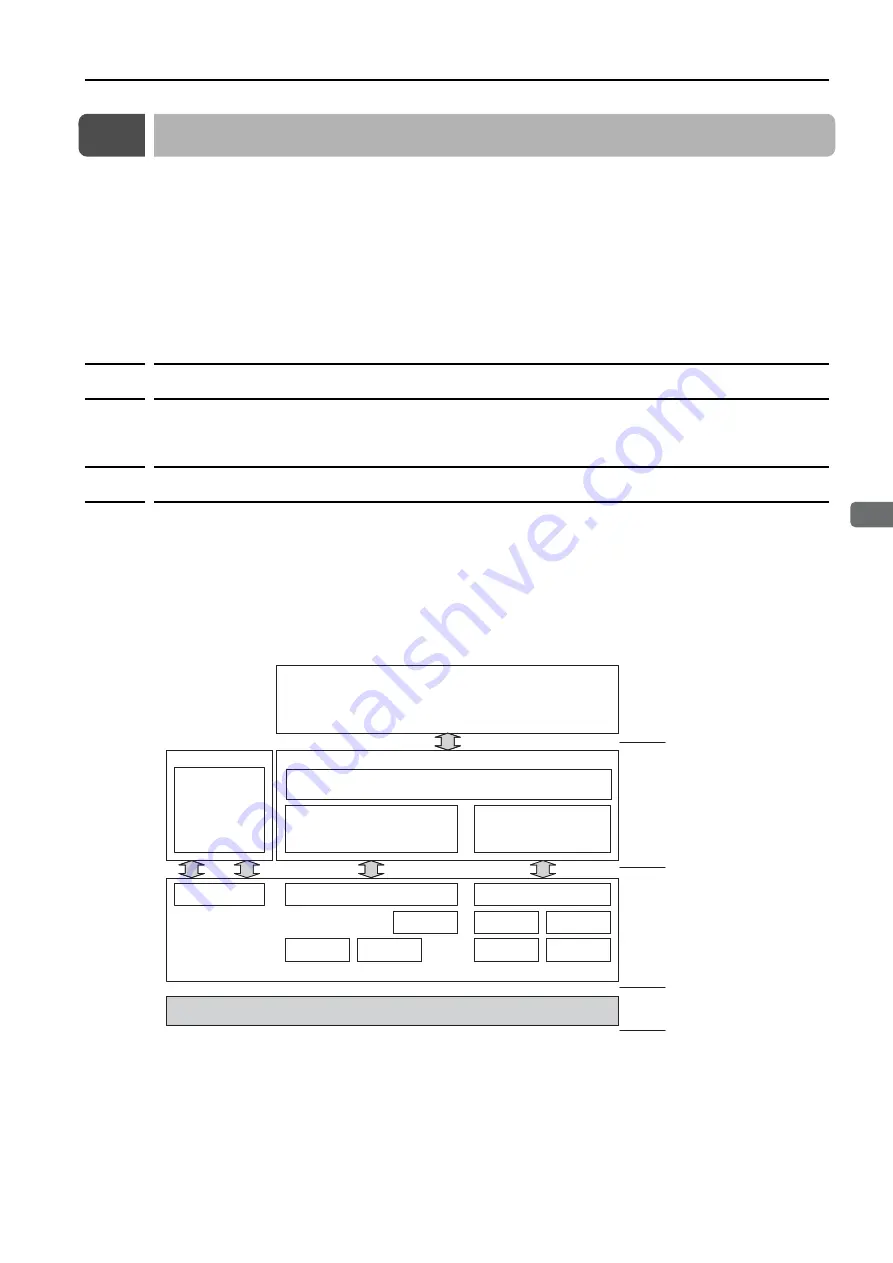
CANopen over EtherCAT OSI Model
The OSI model implemented by the SERVOPACKs consists of three layers: the application
layer (CANopen), the data link layer (EtherCAT), and the physical layer (Ethernet). The four lay-
ers other than the application layer, data link layer, and physical layer are not used. The data
link layer is implemented with EtherCAT communications and the application layer is imple-
mented with the DS402 CANopen drive profile.
This manual describes mainly the specifications of the application layer implemented in the
SERVOPACKs. For detailed information on the data link layer (EtherCAT), refer to documenta-
tion provided by the EtherCAT Technology Group.
The object dictionary in the application layer includes parameters, application data, and PDO
mapping information between the master and slaves.
The process data objects (PDOs) consist of the objects in the object dictionary that can be
mapped to PDO mappings. The PDO mappings define the structure and contents of the pro-
cess data.
SyncMan 3
CANopen service (CoE)
Service data object
(SDO)
PDO mappings
Object dictionary
Mailbox
Process data
Ethernet physical layer
Servo application
EtherCAT data link layer
EtherCAT
state
machine
Registers
FMMU 0
FMMU 2
FMMU 1
SyncMan 2
SyncMan 1
SyncMan 0
Application layer
(CANopen DS402)
Data link layer
(EtherCAT)
Physical layer
(Ethernet)







































































