





























AC70 VC CONTROL FREQUENCY INVERTER MANUAL
FUNCTION PARAMETER DETAILED SPECIFICATION
100
5
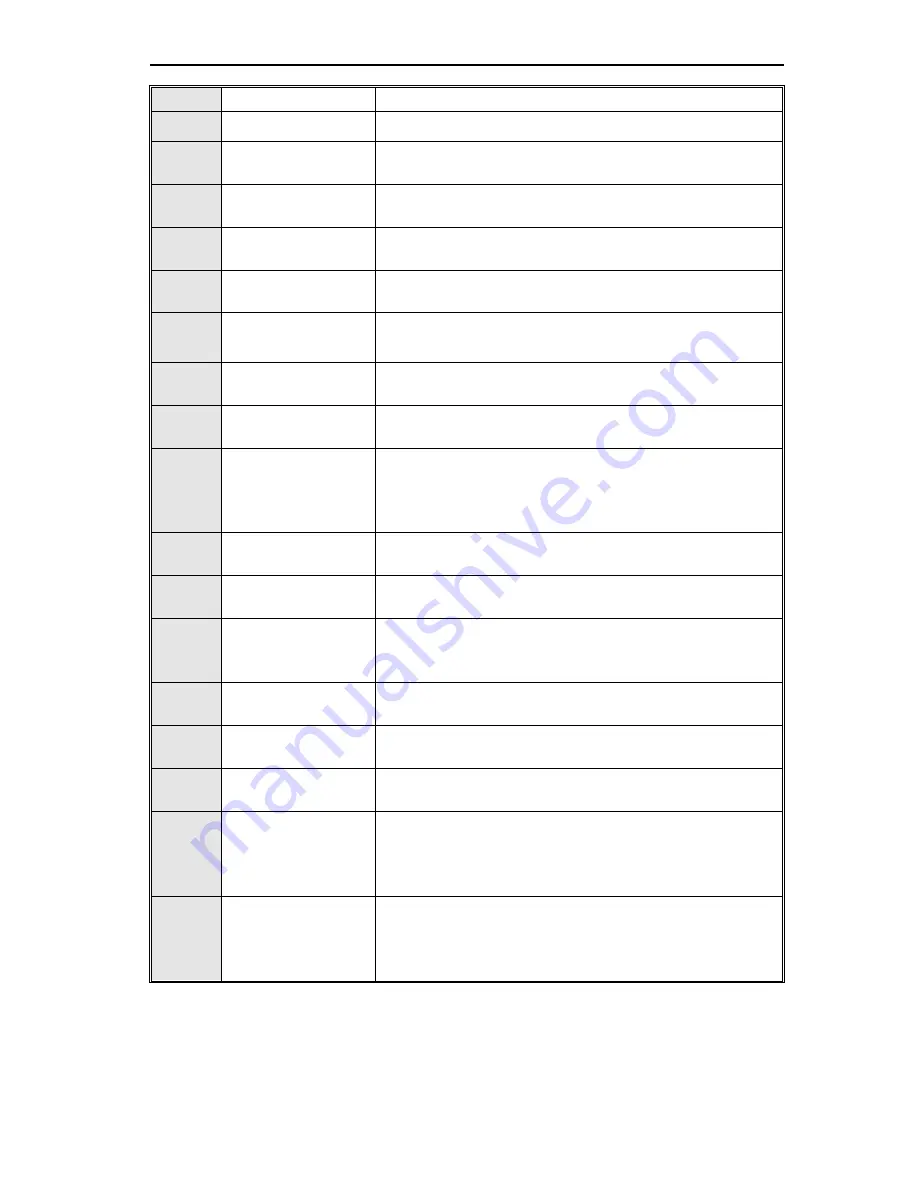
running statues
Output signal when inverter in running status.
6
Reverse running
Output signal when inverter runs in reverse direction
7
Under voltage of
inverter
Output signalwhen inverter shows “LU1/2” alarms due to under voltage
8 Overload
pre-alarm
Outputs signal, when the output current of frequency inverter reach to
[F-36]
and
[F-37]
setting values, it outputs signal.
9
Output frequency reach
upper limit frequency
Outputs signal, when the output frequency reach to upper limit
frequency.
10
Output frequency reach
lower limit frequency
Outputs signal, when the output frequency reach to lower limit
frequency.
11
External fault stop
Outputs valid signal when inverter stop resulted in by external fault
alarm signal input.
12
Timer times up
When it is time up to the given setting time of timer of inverter’s inside.
Outputs a 1 second width valid pulse signal.
13
Counter reach
maximum values
When counter reach to maximum value, output terminal outputs a valid
signal with width equal to external clock period.
14
Counter reach setting
values
When the counter reach the setting values, output terminal outputs
valid signal, and continue to count until achieve to maximum value.
This valid signal will cancel when counter reset which cause by
counted up to maximum value.
15
PID feedback upper
limit alarm
Outputs signal when detecting PID feedback value reach to upper limit
alarm value
[H-26]
.
16
PID feedback lower limit
alarm
Outputs signal when detecting PID feedback value reach to lower limit
alarm value
[H-27]
.
17 Sensor
broken
When the feedback less then
[H-28]
setting value, the sensor is
considered to broken during the detecting signal in PID control. It will
output signal.
18
Program running
cycle completed
When program finishes the cycle running, it output 500ms low level
signal.
19
Program running
step completed
When program finishes the step running, it outputs 500ms low level
signal.
20
Dynamic braking
processing
Outputs signal when perform dynamic braking.
21
Output terminal control
by external
When selects this function, output terminal status can be changed by
[H-79]
setting.
[H-79]
value configured by RS485 communication, the
binary 0,1, 2 are corresponding to relay output terminal, Y1, and Y2
terminal.
22
22. Fault alarm 1.
(Including fault auto
reset period, including
fault-LU1 )
Output signal when fault alarms happening (including OU, OL, SC,
OC, OH, LUS, etc), enable output including fault reset auto period
Tip: The output terminal of relay TA-TC close, TB-TC open are considered to valid signal, low level output
terminal Y1, Y2 combine with (+24) terminal output 24V power supply considered valid signal.