




























6. Troubleshooting
1.
Alarm lists
6-2
TSC
1-1
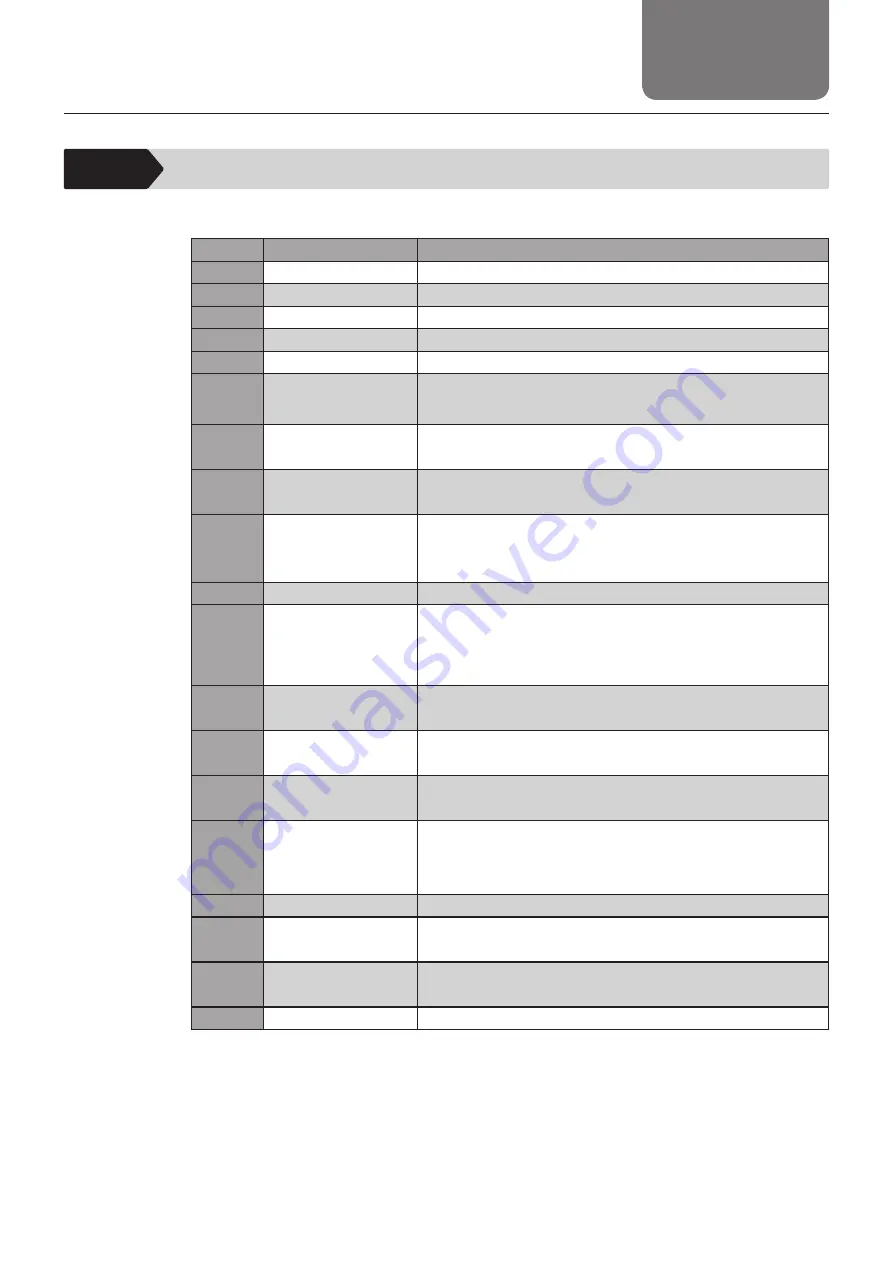
Alarm lists
Code
Alarm name
Content
1
Motor overvolt
Overvoltage is applied to the motor power supply
2
Control overvolt
Overvoltage is applied to the input power supply
3
Control low-volt
The input power supply is being reduced
11
Parameter error
The value set in the parameter exceeds the effective range
21
Move comm. at SV OFF
Move command has been entered with the servo OFF
22
Move comm. befor
ORG
①
Position move command had been entered when zero return was
not completed
②
Move command has been entered while returning to zero point
23
ORG time out
After starting the zero return operation, it has not been completed
even after the elapse of preset time
24
Writing error
on move
During manual movement in Function mode 1, writing signal (PWRT
signal) has been entered
25
Position data anomaly
①
There is no data in the specified program table
②
In Function mode 5, the target position in the "POSI" field is
specified using a relative coordinate
③
"IN-POSI" sign for pressing operation has incorrectly been set
31
Position comm. error
Actual speed has exceeded the preset maximum value
32
Excessive position error
(deviation)
The deviation between commanded position and current position has
exceeded the parameter No. 30
Note: When the Standstill mode is ASO1 to 3, alarm generates
when the following move command is executed (usually generates
immediately after exceeding the parameter)
33
Soft limit
over
The current position has exceeded the parameter No. 3 or 4
34
Push range
over
During the pressing operation, the unit has been pushed back to the
target position due to the too strong push-back force
51
EEPROM
error
Abnormal data was detected in non-volatile memory checking during
the start-up operation
52
Detection error
①
There is no encoder feedback when performing the excitation
detection
②
Since there is an obstacle during the initial servo on behavior after
turning on the power, the servo cannot be successfully turned on
53
Encoder error
The encoder was disconnected.
54
Servo error
After receiving the move command, the motor operation cannot be
performed for 2 seconds or more before reaching the target position
55
Driver controller
The surrounding temperature of the power transistor within the driver
controller is too high
Overheat
63
Emergency stop
Emergency stop has been entered
Summary of Contents for TSC Series
Page 98: ...MEMO ...







































































