





























14.
Parameters
5-20
5. Operations and
adjustment
TSC
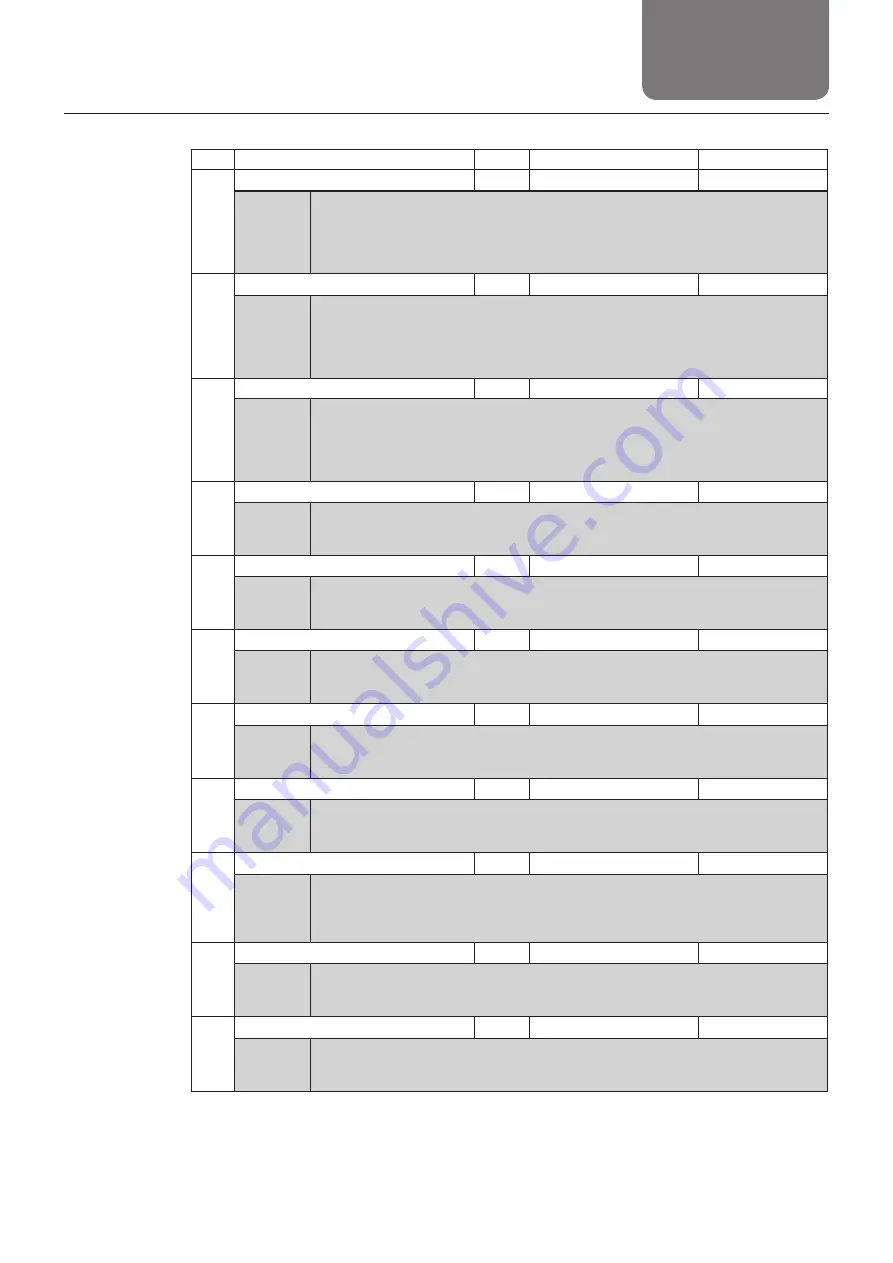
No.
Parameter name
Unit
Setting range
Default value
11
Cur. limit at stop
%
1 to 70
70
Description
Sets the current applied to the motor when the actuator is in stop status. Increasing the
value increases the stoppage holding torque (settable to the linear), but also increases
the heat generation and the electric power usage. The current value tailored to the
standard specification of the actuator is set before shipment.
12
Cur. limit at origin
%
1 to 100
80
Description
Sets the current applied to the motor when the actuator returns to zero point. Increasing
the value increases the zero return torque (settable to the linear), but also increases the
heat generation and the electric power usage. The current value tailored to the standard
specification of the actuator is set before shipment.
13
Move command type
[Select]
Level/Edge
Level
Description
Selects the method of inputting move command (ST 0 to 6) (pin. 3 to 9) for function mode
4. Level: The movement is started when turning the input signal ON and is stopped when
turning it OFF on the way. Edge: The movement is started at the rising edge of the input
signal and is not stopped even when turning it OFF on the way.
15
Push speed
mm/s
1 to 20
10
Description Defines the pressing speed after reaching the target position during pressing operation. A
default value tailored to the actuator characteristics is set before shipment.
*16
Jog speed
mm/s
1 to 250
10
Description D-STEP: Sets the jog speed on the PROGRAM screen. For the speed setting by I/O
input, see No. 21.
17
Auto servo OFF 1
s
0 to 9999
9999
Description Sets the time after completing the positioning until the servo turns OFF when "Stop
mode" of the program table is "ASO1".
18
Auto servo OFF 2
s
0 to 9999
9999
Description Sets the time after completing the positioning until the servo turns OFF when "Stop
mode" of the program table is "ASO2".
19
Auto servo OFF 3
s
0 to 9999
9999
Description Sets the time after completing the positioning until the servo turns OFF when "Stop
mode" of the program table is "ASO3".
*20
Speed override
%
1 to 100
100
Description
For protection against the danger in trial operation, this is used when you want to operate
the actuator at a low speed. In the operation, it is possible to multiply the movement
speed in the "Speed" field of the "Program table" by the ratio of the value set here.
*21
I/O jog speed
mm/s
1 to 250
10
Description Sets the speed in jog operation when external input instruction by I/O (Function mode 1)
is selected. For the speed setting by D-STEP, see No. 16.
*22
I/O inching distance
mm
1 to 5000
10
Description Sets the movement distance by inching operation when external input instruction by I/O
(Function mode 1) is selected. For the speed setting by D-STEP, see No. 31.
Note: The parameter with "*" attached to "No." can be changed while keeping the servo ON.
Note: [Select] in the "Unit" field is selected from the items displayed in "Setting range."
Summary of Contents for TSC Series
Page 98: ...MEMO ...







































































