





























FL20-C Series
17
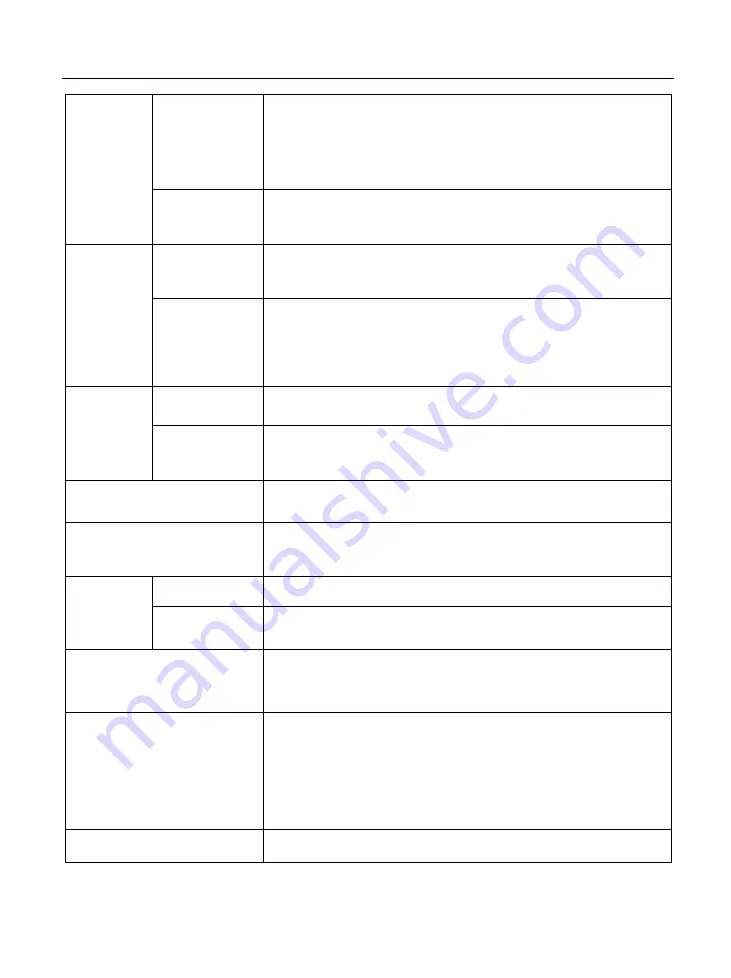
Input signal
Control input
Servo enabled, alarm reset, command pulse clear, command pulse
prohibited, forward prohibited, reverse prohibited, forward torque
limit, reverse torque limit, internal speed selection, internal
position triggered, origin/mechanical origin searching triggered,
zero speed clamp, probe etc.
Feedback
1.
Absolute value encoder.
2.
Incremental encoder.
3.
Resolver
Output
signal
Control output
Servo ready, servo alarm, positioning reach, speed reach,
electromagnetic brake output, rotation detection, speed limit,
homing completed, torque limit etc.
Encoder signal
frequency
dividing output
1.
Encoder Z phases open-collector output;
2.
Phase -A, -B: frequency-division differential output
(
not
isolated, any frequency-division ratio
)
Phase-Z is not frequency-division output.
3.
Z pulse time extended function.
Position
control
Input mode
EtherCAT communication set, internal register,
high-speed pulse input
Electronic gear
ratio
1.
0.01≤ B / A ≤100
2.
Support 2 groups of electronic gear, which can be selected or
switchover by users.
Acceleration/Deceleration
The setting range of accel/decel time is 1
~
30000ms
(from 0 accelerated to rated speed)
Communication
1.
RS485/RS232 communication port is connected with PC, to
set control parameters and to monitor servo.
2.
Support EtherCAT bus.
Parameter
setting
Keypad
Use 4 keys to set parameter, which is displayed by 5 LEDs.
PC/PLC
PC/PLC software can be used to set servo parameter through
RS485 communication interface.
Monitor function
Output current, PN voltage, motor speed, motor feedback pulse,
motor feedback revolution, given pulse, given pulse error,
given speed, given torque etc.
Protection function
Main circuit overvoltage, undervoltage, overload, overcurrent,
encoder error, overspeed, abnormal pulse control command,
emergency stop, servo overheat, main-circuit power phase-loss,
regeneration brake error, position, over position control, lithium
battery alarm, Sync. loss, network initialization failure, sync.
cycle setting error, sync. cycle excessive error etc.
Applicable load inertia
Lower than 5 times of servo motor inertia.







































































